 |
| 電腦視覺在車輛碰撞預測的應用 |

Klacci 凱樂奇交通運輸業解決方案
關鍵要點
- 電腦視覺透過即時物體偵測,將車輛碰撞風險降低 35-60%
- 與 LiDAR 系統相比,標準 RGB 攝影機可節省 10 倍成本
- 機器學習模型在行人和車輛辨識方面,可實現 95% 以上的準確率
- 即時處理可在 100 毫秒內發出碰撞警告
電腦視覺如何預防車輛碰撞
在交通流量和人口密度不斷上升的當今世界,道路安全正成為一個重大問題。車禍是全球主要的交通事故致死原因之一。汽車產業正在努力探索創新方法,來應對日益成長的道路交通流量。最近,重點轉向利用電腦視覺和機器學習,來創建先進的碰撞檢測和預防系統。本部落格將探討這些技術,如何改變預測和避免車禍的方式。
電腦視覺如何在碰撞檢測中發揮作用
電腦視覺的核心,是從視覺數據中提取有意義的訊息,這使得它非常適合諸如物體檢測、辨識和追蹤等任務。在車輛碰撞偵測領域,電腦視覺系統利用各種技術,來解讀和回應周圍環境中的動態視覺線索。
(I)電腦視覺系統如何處理攝影機影像?
(i)電腦視覺演算法處理車載攝影機,擷取的原始影像資料。
(ii)濾波和邊緣偵測等影像處理技術,可以增強影像中相關特徵的清晰度。
(iii)特徵提取包括透過模式辨識,來辨識車輛、行人和障礙物等獨特元素。
(II)電腦視覺系統如何辨識不同的物體?
(i)包括卷積神經網路 (CNN) 在內的深度學習模型,在辨識和分類視野內的物體方面發揮關鍵作用。
(ii) 在海量資料集上訓練這些模型,使系統能夠區分各種物體,及其對應的類別,這對於碰撞偵測非常重要。
(III) 電腦視覺系統對潛在碰撞的反應速度有多快?
(i) 碰撞偵測的即時性,要求快速處理視覺資料。
(ii) 電腦視覺演算法依序分析幀,使系統能夠根據辨識出的物體及其軌跡,並做出即時決策。
電腦視覺在車輛安全的實際應用有哪些?
電腦視覺在防撞系統中找到了實際應用,促進了高級駕駛輔助系統 (ADAS) 和自動緊急煞車 (AEB) 技術的發展。
(I) 電腦視覺如何偵測車道偏離?
(i) 電腦視覺演算法監控車道線,並在駕駛者偏離指定車道時,及時發出警告。
(ii) 車道偵測包括邊緣偵測、霍夫變換和影像分割,以準確辨識和追蹤車道。
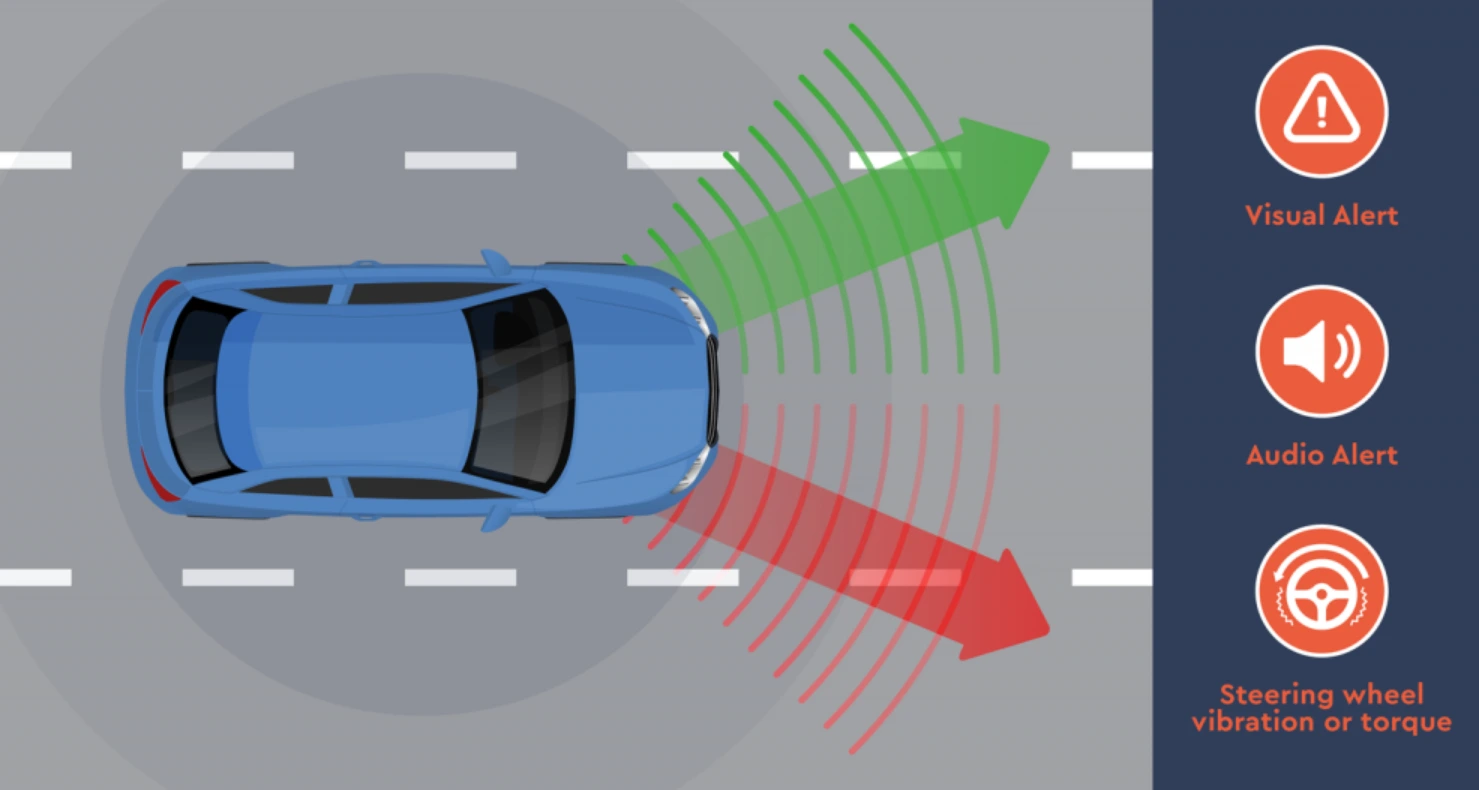
(II) 電腦視覺如何警告駕駛員碰撞風險?
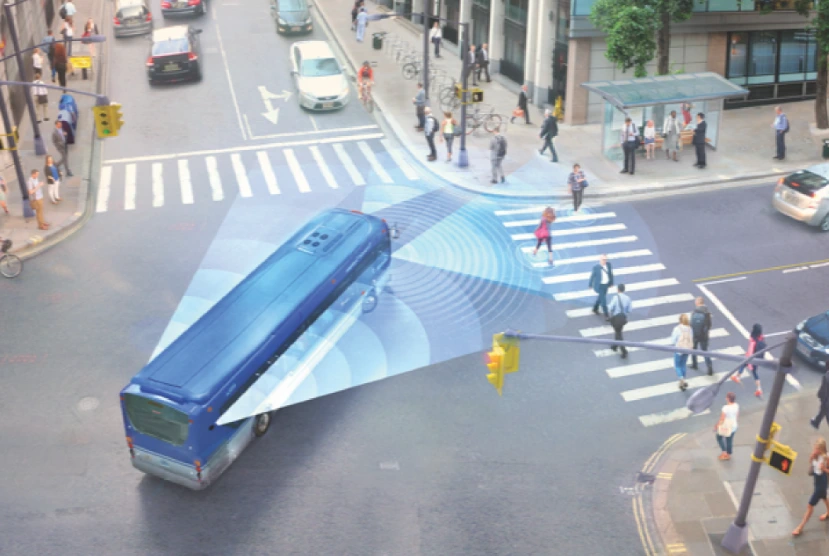
(i) 物體偵測演算法辨識,並追蹤潛在的碰撞危險,包括車輛、行人和障礙物。
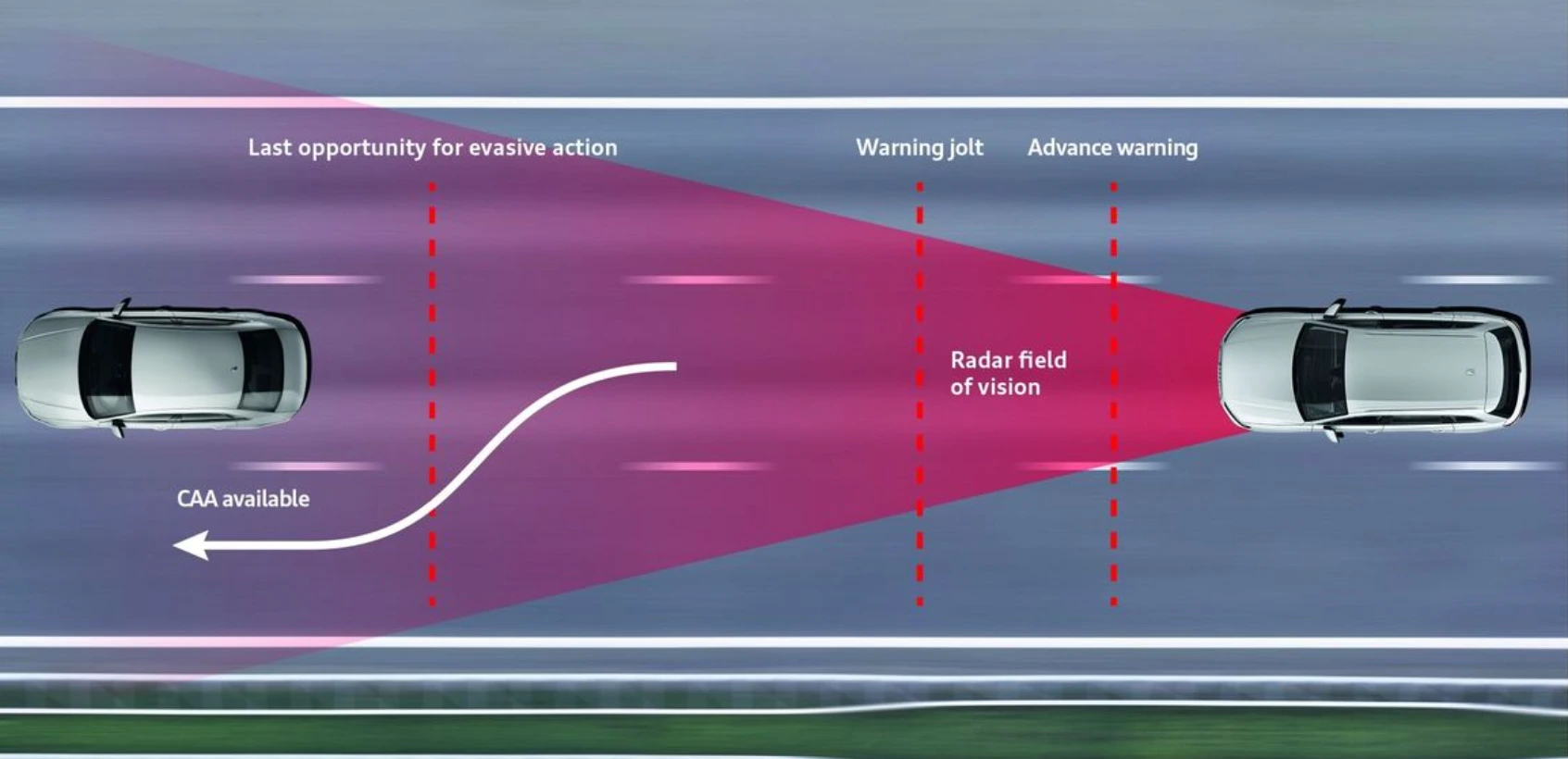
(ii) 當系統根據偵測到的物體的軌跡,和速度預測,到潛在碰撞時,會觸發即時警報。
(III) 機器學習能否在車輛碰撞發生前進行預測?
(i) 經過各種資料集訓練的機器學習模型,可以根據偵測到的物體的歷史行為,預測碰撞機率。
(ii) 這些模型不斷學習和適應,從而提高碰撞預測的準確性。
傳統光達系統在車輛上有哪些問題?
將雷射雷達 (LiDAR) 系統,與單色攝影機整合到防撞系統中,標誌著近期研究和技術進步的關鍵性轉變。傳統上,高級駕駛輔助系統 (ADAS) 和自動緊急煞車 (AEB) 等技術,嚴重依賴這些感測器來提昇道路安全性。然而,LiDAR 與攝影機的整合也帶來了挑戰,尤其是在成本和設計複雜性方面。
(I) 為什麼 LiDAR 系統如此昂貴?
(i) LiDAR 系統使用雷射光束測量距離,並創建周圍環境的詳細 3D 地圖,傳統上製造和整合到車輛的成本很高。
(ii) 雖然單色攝影機比 LiDAR 更經濟實惠,但仍會增加實施防撞系統的總成本。
(iii) 需要多個感測器覆蓋車輛周圍的 360° 視野,這會進一步增加成本。
(II) LiDAR 系統會帶來哪些設計問題?
(i) 將 LiDAR 和攝影機整合到車輛中,需要仔細考慮這些感測器的設計、位置和對準度,以確保最佳功能。
(ii) 這些感測器的實際尺寸和形狀,會影響車輛的空氣動力學和美觀度。
(iii) 這些感測器的佈線和電源需求,會增加車輛整體設計的複雜性。
(III) LiDAR 和攝影機整合的技術限制是什麼?
(i) 雖然 LiDAR 在提供精確的距離測量方面表現出色,但它在暴雨或大霧等惡劣天氣條件下可能會受到影響,從而限制其有效性。
(ii) 單色攝影機雖然用途廣泛,但也面臨著弱光條件下,能見度降低等挑戰。
(iii) 這些感測器的融合目的在克服各自的局限性,但實現無縫整合仍然是一個持續的挑戰。
(IV) 為什麼 LiDAR 系統需要如此強大的運算能力?
(i) LiDAR 系統會產生大量點雲數據,需要強大的運算能力來處理。
(ii) 從攝影機訊號中,提取有意義的資訊,也需要複雜的電腦視覺演算法,這會增加計算負擔。
電腦視覺為何優於雷射雷達系統?
鑑於光達 (LiDAR) 與攝影機整合帶來的挑戰,電腦視覺應運而生,成為一種顛覆性的防撞替代方案:
(I) 與雷射雷達 (LiDAR) 相比,電腦視覺能節省多少成本?
(i) 電腦視覺系統通常使用標準 RGB 攝影機,與雷射雷達 (LiDAR) 等專用感測器相比,它們更具成本效益。
(ii) 電腦視覺的經濟實惠,使其成為廣泛應用於各種車型的誘人選擇。
(II) 電腦視覺如何適應不同的駕駛條件?
(i) 電腦視覺系統能夠適應各種環境條件,使其能夠靈活應對諸如低光照條件等挑戰。
(ii) 機器學習演算法的使用使電腦視覺系統,能夠持續學習並不斷改進其性能。
(III) 為什麼電腦視覺更容易安裝在車輛上?
(i) 與整合式雷射雷達 (LiDAR) 和攝影機的物理複雜性相比,電腦視覺系統通常涉及較少的侵入式安裝,從而最大限度地減少了設計變更。
電腦視覺處理視覺資料的速度有多快?
(i) 現代運算能力能夠即時處理影像和圖像數據,使電腦視覺系統能夠做出即時決策,這對於避免碰撞非常重要。
電腦視覺可以與現有車輛系統協同工作嗎?
(i) 電腦視覺可以與現有車輛基礎設施無縫整合,充分利用車載運算能力的進步。
現代電腦視覺物體辨識的準確性如何?
(i) 電腦視覺領域的持續進步,尤其是在物體辨識和追蹤方面的進步,提高了防撞系統的準確性和可靠性。

當前挑戰與未來解決方案
儘管電腦視覺在碰撞檢測方面,取得了長足進步,但仍存在一些挑戰。
(I)惡劣天氣如何影響電腦視覺表現?
(i)雨、霧和低光條件,會影響視覺感測器的有效性。
(ii)正在進行的研究重點,是增強電腦視覺演算法,使其在惡劣天氣下也能穩健運作。
(II)為什麼車輛安全需要多個感知器?
(i)將來自多個感測器(包括光達和雷達)的數據與電腦視覺數據整合,可以增強備援度並提高系統可靠性。
(ii)感測器融合演算法,可以整合來自不同來源的資訊,從而更全面地了解環境。
(III)邊緣運算如何提升電腦視覺速度?
(i)邊緣運算可以滿足即時碰撞偵測的運算需求。
(ii)強大的板載處理能力,確保快速分析視覺數據,而無需過度依賴外部伺服器。
電腦視覺在車輛安全領域的未來
展望未來,電腦視覺、機器學習和感測器技術之間的協同效應,蘊含著巨大的潛力。電腦視覺演算法的持續研究和創新,加上硬體功能的進步,必將重新定義車輛碰撞偵測的基準。透過深入了解這些技術複雜性,我們為更安全的道路,以及汽車產業碰撞預防方法的革命性轉變,鋪平了道路。
光達和單色攝影機在碰撞預防系統中的整合,提出了一些可以透過電腦視覺解決的問題,電腦視覺技術作為一種可行的替代方案脫穎而出。它為當前和未來的汽車技術,提供了可行的解決方案,其多功能性、經濟性和低設計複雜性,使其成為追求更安全道路的變革者。
關於電腦視覺在車輛安全領域的常見問題
問題 1:為什麼我們需要碰撞偵測和碰撞預防系統?
全球每年有超過 130 萬人因車輛碰撞死亡,其中 94% 是人為失誤造成的。
電腦視覺碰撞偵測系統是非常重要的安全網,它持續監測車輛周圍環境,並在駕駛員錯過潛在危險時,發出警告或自動緊急煞車。這些系統分析視覺數據的速度,比人類的反應速度快 1000 倍,可以偵測可能導致致命事故的行人、車輛和障礙物。
問題 2:深度學習可以預測高解析度汽車碰撞風險地圖嗎?
是的,深度學習模型可以創建詳細的碰撞風險地圖,準確率高達 85-92%。
先進的神經網路會分析歷史碰撞數據、交通模式、道路狀況和環境因素,產生高解析度風險地圖。這些模型透過處理數百萬個數據點(包括車輛軌跡、天氣狀況和基礎設施細節)來辨識碰撞熱點。產生的地圖可協助城市規劃人員提高道路安全性,並為自動駕駛汽車提供預測性路線規劃。
問題 3:碰撞偵測演算法可以預測車輛軌跡嗎?
現代演算法可以預測最多提前 5 秒的車輛軌跡,準確率高達 95%。
電腦視覺系統追蹤車輛速度、加速度、轉向角度和方向,以預測可能的路徑。基本碰撞偵測著重於直接威脅,而高階軌跡預測,則使用針對各種駕駛場景訓練的機器學習模型。這使得主動安全措施成為可能,而非被動防撞。

0 comments:
張貼留言