![]()
 |
| tyco 監控攝影機系列(總代理上敦企業) |
雖然你可能已經習慣了自己丟垃圾(希望如此),但有了現代人工智慧 (AI),就沒有必要再這樣做了。
Trashformer 團隊由一群 NVIDIA Jetson 實習生組成,他們使用 Jetson TX2 打造了一個小型人形機器人,可以透過神經網路模型自主偵測和拾取垃圾。
這些高中開發者,於今年六月加入 NVIDIA,僅用七週時間就打造出一台先進的清潔機器。他們之前都曾參加過 FIRST 機器人大賽,但今年夏天,他們的工作重點是將 AI 融入實際應用。
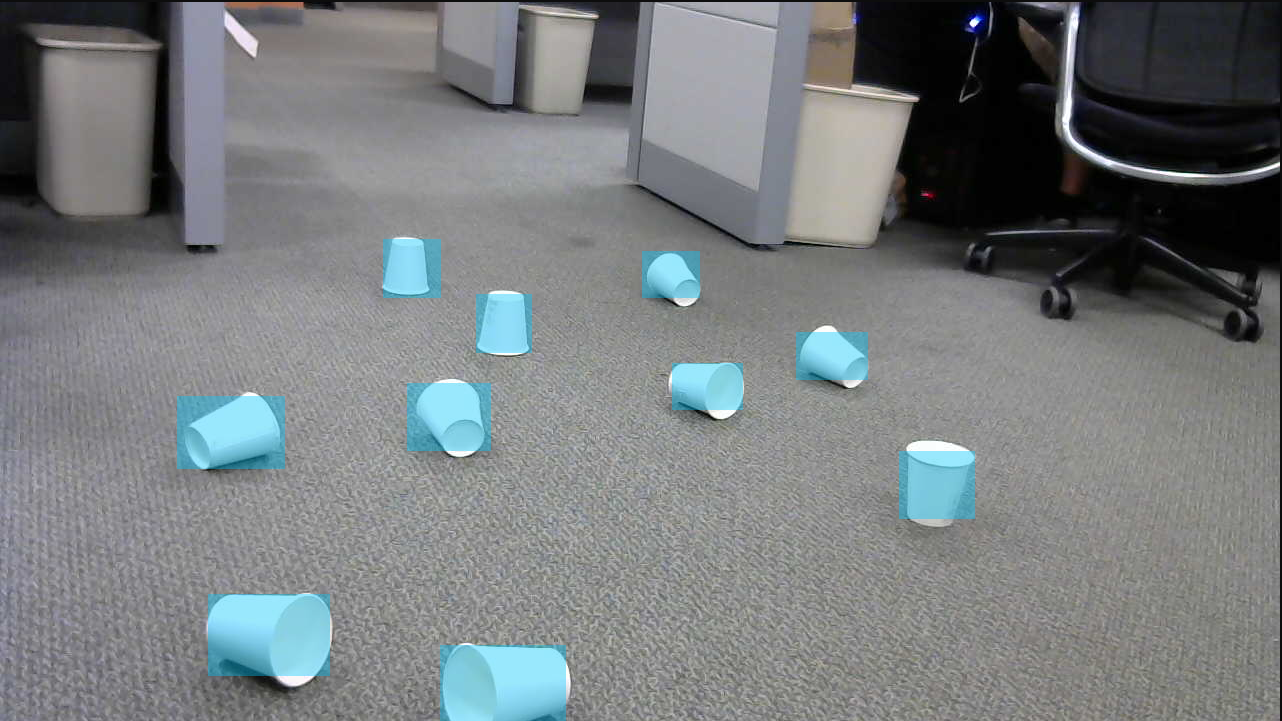
這款人形機器人結合了 Jetson TX2、Bioloid GP 和羅技網路攝影機。其神經網路名為 Trashnet,是一個多分類模型,使用 Tesla P100 和 Quadro P5000,以及 cuDNN 加速的 Caffe 深度學習框架進行訓練。它會持續掃描網路攝影機的即時畫面,並在偵測到的任何垃圾周圍繪製邊界框。然後,這些邊界框的陣列會用於執行特定的路徑。 NVIDIA JetPack 提供了執行這些操作所需的所有必要庫,並開箱即用。

「假設有人把一個杯子扔到地上。如果杯子在機器人的視野範圍內,它就會朝杯子走去,直到杯子的邊界框超出範圍。模型會追踪杯子的方向,然後啟動預先設定的程序將其撿起。為了防止誤觸發,只有當杯子位於視野底部時,撿起程序才會啟動。」Trashformer 團隊說道。
觀看下面機器人的運作情況。
根據該團隊介紹,這項檢測技術可以輕鬆遷移到其他機器人。
「想像街道清潔無人機,這種模型可以稍加調整並佈署,以適應其他外形尺寸。」難以遷移的技術之一是移動控制(motion control),但 NVIDIA Isaac 中模擬和訓練移動的能力,將解決這個問題。
Trashformer 的視覺網路,是任何機器人辨識垃圾的精確方法,這項技術或許有一天,能讓人們不再為垃圾的放置地點而擔憂。
點擊此處造訪 GitHub 程式碼庫。

| iF+ 系列雙系統免接觸式智慧門鎖 |
0 comments:
張貼留言