什麼是電腦視覺以及它為何重要?


點雲機器視覺 Point Cloud Machine Vision
雷達技術使用無線電波來檢測和辨識遠距離的物體。你可以在許多行業應用中找到雷達,包括空中交通控制和遙感。同樣的工作原理適用於雷射雷達(光檢測和範圍),儘管這項技術使用光脈衝而不是無線電波。
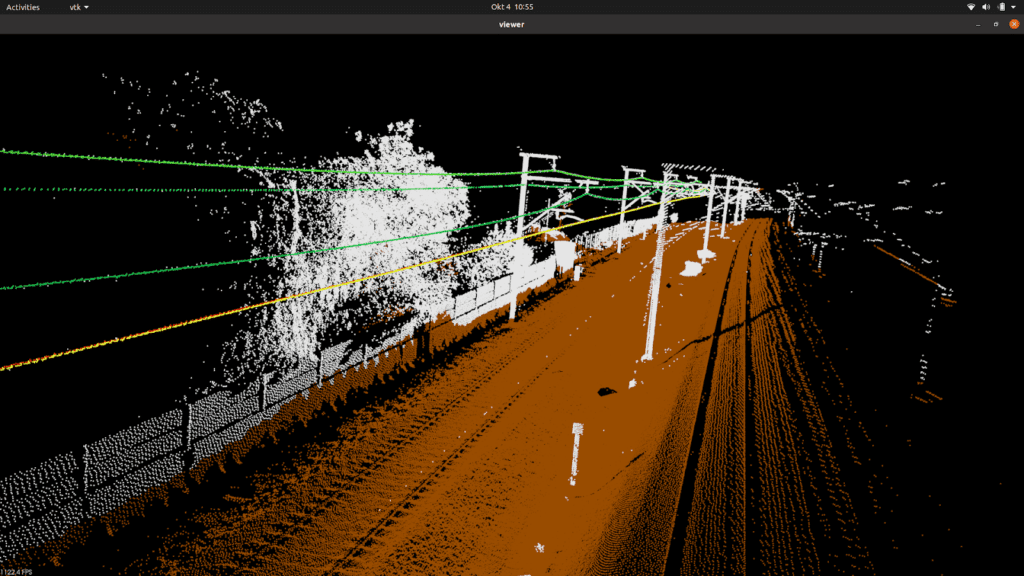
雷射雷達感測器有一個發射器和接收器。發射器發出光脈衝。這個脈衝遇到了一個將光反射回接收器的物體。透過測量反射光返回接收器所需的時間,雷射雷達可以確定到物體的距離,也可以確定其速度和其他運動特性。此資訊可以對映成 3D 顯示,即點雲影像。
雷射雷達的優勢:
- 堅固性:雷射雷達在各種天氣和光線條件下都很有效。
- 深度:雷射雷達提供與物體(第三維度)的距離及其速度的資訊。
- 計算能力:與傳統攝影機相比,雷射雷達所需的處理能力更少。
雷射雷達的缺點:
- 無顏色:雷射雷達提供沒有顏色資訊的單通道影像。
- 無文字:雷射雷達不適用於文字辨識,因為這需要非常高的點密度。
Kapernikov 幫助比利時鐵路網路營運商 Infrabel 進行各種點雲機器視覺專案。我們的解決方案使 Infrabel 能夠監控其基礎設施(如電纜、軌道)和植被過度生長的狀況。與人工檢查相比,雷射雷達的使用要便宜得多,更精確得多,並直接整合到 Infrabel 的管道中。這種基於軟體的方法也幫助 Infrabel 縮減了專用工具的數量。
高光譜機器視覺
高光譜成像結合了來自電磁頻譜不同部分的資訊。我們的眼睛只能感知可見光,可見光構成該光譜的一部分。當光線進入眼睛時,它會落在視網膜上,視網膜是眼睛後面的一個膜,由三種類型的光敏細胞組成。傳統的攝影機影像也由 3 個訊號(紅色、綠色和藍色)生成,這些訊號密切複製視網膜中的訊號。透過結合紅光、綠光和藍光,攝影機可以重現各種顏色。
但電磁波譜比可見光要寬得多。光譜的其他部分也提供了寶貴的資訊。例如,短波長的 X 射線能夠穿過物質,並提供結構內部的視覺影攝影機。另一個例子是長波長紅外線輻射,可用於熱感或夜視。
在機器視覺中,我們可以結合來自頻譜不同部分的資訊,以擴充傳統攝影機的功能。要做到這一點,我們需要在 RGB 訊號之上新增通道。通道的寬度和數量可能差異很大,從幾個(多光譜)到數百個(超光譜)甚至數千個(超光譜)的通道,波長範圍從熱紅外線到紫外線。
高光譜成像的優點:
- 廣泛的功能:高光譜攝影機揭示了在光學光譜中看不到的細節。
- 成像光譜:高光譜攝影機將成像和光譜相結合,使它們能夠視覺化材料並確定其特徵,即提供空間和光譜資訊。
- 功多功能性:高光譜攝影機可以針對特定應用進行最佳化。
高光譜成像的缺點:
- 高成本:高光譜攝影機比標準 RGB 攝影機貴幾倍。
- 重型影像尺寸:高光譜攝影機需要大量的資料儲存和處理能力。
- 複雜性:為了將接收的資訊調整為人類可讀的形式,需要額外的後處理演算法。
高光譜成像有許多應用,包括:
- 遙感:安裝在衛星或無人機上的高光譜攝影機從上面收集視覺資訊。這可用於特定目的,如陸上石油勘探的地球表面掃描,以及水和沿海管理(例如葉綠素含量)。
- 工業應用的品質控制:這包括檢測異物、假藥和自動廢棄物分類。
- 醫療應用:在這裡,高光譜成像是一種新興技術,特別是在疾病診斷和影像引導手術方面。
AI 機器視覺
從歷史上看,機器視覺和人工智慧(AI)是密切相關的。卷積神經網路(CNN)是一種現代人工智慧工具,其靈感來自我們的大腦如何感知視覺資訊。開發第一個卷積網路是為了解決手寫數位資料集的影像辨識問題。結果令人驚歎,並證明人工智慧機器視覺很容易超越當時存在的所有其他方法。
今天,人工智慧不僅限於影像辨識(例如 這是狗的形象嗎?)。它還用於更複雜的任務,如物體檢測(例如 圖片裡有狗嗎?它在哪裡?) 和例項分割(例如影像中是否有狗,哪些畫素對應於狗?) 人工智慧可以使用任何機器視覺系統的輸入,無論是雷射雷達、傳統攝影機還是高光譜攝影機。人機視覺開發人員的作用,是收集和準備輸入資料,選擇適合特定任務的模型架構,並訓練模型以最佳化其效能。
人工智慧機器視覺的優勢:
- 輕鬆找到人類觀眾看不到的趨勢和模式。
- 模型直接從資料中學習
- 廣泛的應用
人工智慧機器視覺的缺點:
- 時間密集型:資料需要由人們準備和標記,這可能是時間密集型的。
- 泛化錯誤:對新的、看不見的資料樣本執行相同的任務,將需要你重新訓練模型。
- 難以解釋:大多數人工智慧演算法不容易被人類操作員解釋,這使得錯誤分析更加困難。
- 資源密集型:使用高階演算法的人工智慧機器視覺將需要多個 GPU 單元。
Kapernikov 為最佳排序工作,是人工智慧機器視覺的一個很好的例子。Kapernikov 開發了最先進的機器學習演算法,以幫助 Optimum 在其光學分揀機中管理食物分揀過程。多虧了這些演算法,學習檢測/辨識新產品的速度更快,也更直觀,並且很容易對排序程式進行線上調整。
該演算法辨識在收穫過程中進入機器的危險異物,如石頭、金屬或玻璃。其次,它監測產品品質,將蔬菜分為好的和損壞的。結果令人印象深刻:這兩項任務都以生產執行的速度即時執行,並順利整合到生產管道中。
總之,機器視覺是一種強大的技術,能夠解決先進的工業問題。在本報導中,我們只回顧了三種類型的機器視覺技術,當然還有更多。在Kapernikov,我們將幫助你,為你的具體問題選擇最佳機器視覺技術,並確保它以最高效、最穩健的方式工作。
 |
0 comments:
張貼留言