

Klacci 凱樂奇交通運輸業解決方案
2019 年,全球公共交通乘客量接近 600 億。火車提供了一種永續、經濟且穩定的通勤方式,但事故卻頻傳,令人痛心。日本是人均交通運輸量最高的國家之一,自 2010 年以來,已有超過 7,000 人,死於這些大多可預防的火車事故,最近平均每天有兩人以上喪生。
在該專案中,我們將探索如何利用電腦視覺的力量,來預防和減輕鐵路事故。
本計畫及個案研究是與日本小田急電鐵合作完成的研究計畫。
辨識問題案例
大多數火車事故,都是由軌道上的人員或車輛,與迎面駛來的列車相撞造成的。目前已有解決方案,例如在平交道和月台閘門上方,安裝提升軌道,但據一篇報導稱,每英里提高軌道的成本,高達數千萬美元甚至更多,而每個車站安裝月台閘門的平均成本,超過七百萬美元。
日本及世界各地的鐵路報告,和公共交通統計數據顯示,大多數事故主要發生在兩個地方:車站和平交道(人員和/或車輛通過軌道的地方)。
具體來說,死亡率最高的兩種情況是:人員墜落軌道,以及人員/車輛被困在平交道。
確定解決方案
為了解決、預防和避免這些問題領域,發生的事故,我們確定了三種檢測潛在或即將發生的危險,並啟動解決策略的方法:
- 人員跌落車站軌道:觸發煞車、鳴笛等。
- 人員或車輛卡在平交道中間:觸發煞車、鳴笛等。
- 人員危險地靠近軌道邊緣:鳴笛。
為了檢測這些危險,我們將開發一個電腦視覺模型,該模型能夠辨識列車影像來源中的以下物體:
- 人員
- 汽車
- 火車軌道
- 鐵路平交道
- 月台
在此應用案例中,快速檢測這些物件非常重要,因此為了有效處理影像來源的每一幀,我們將建立兩種不同類型的模型。對於偵測人員和汽車,由於它們在影像來源中,佔據的區域相對較小,因此物體偵測模型提供的邊界框,足以滿足偵測需求,而且速度很快。由於精度對於確定軌道、月台和道口的位置非常重要,我們將創建一個實例分割模型(通常速度較慢),來檢測這些鐵路基礎設施。
為了支援快速偵測和回應潛在事件,我們可以將這些解決方案佈署到列車上的裝置上,以便它們能夠在不依賴網路連線的情況下,快速做出反應。
 Klacci 凱樂奇商用級智慧門鎖各種應用解決方案
Klacci 凱樂奇商用級智慧門鎖各種應用解決方案
使用 Roboflow 建立客運列車資料集
我們使用一台 GoPro 攝影機收集數據(有點好奇,為什麼不用專業監控攝影機),用於標記前面提到的專案,這些數據將用於我們的事故預防模型。該攝影機放置在小田急線特快列車的車頭前方,覆蓋了從藤澤站到東京附近的新宿站,全長 35 英里(55 公里)的路段,途經 33 個車站,停靠 5 個車站。
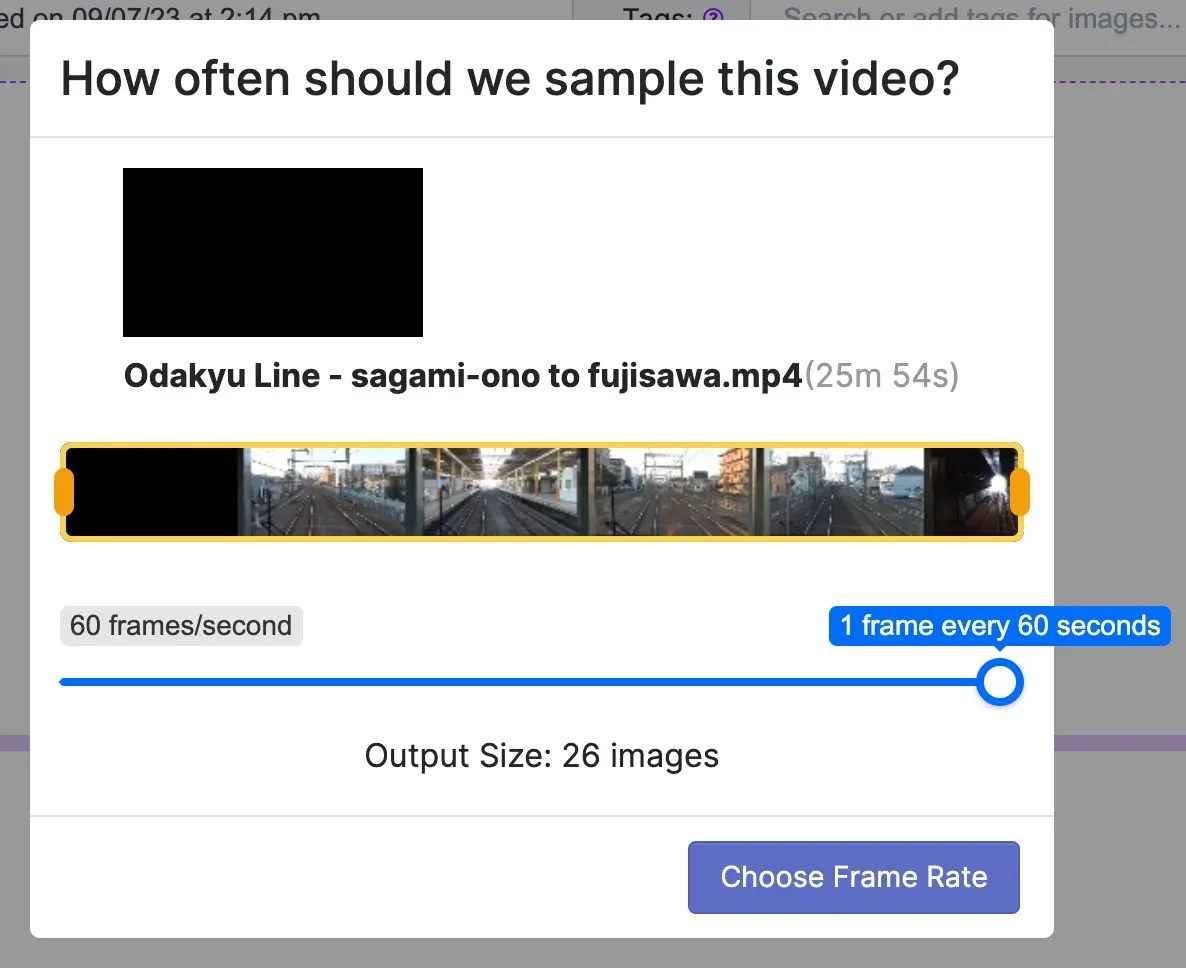
我們將首先建立一個用於偵測列車基礎設施(月台、軌道、道口)的模型。收集資料後,我們最初希望訓練一個初步模型,以便能夠使用模型輔助標記來加快標記過程。首先,我們透過選擇較低的幀採樣率,來導入我們捕獲的兩小時長的影片。
然後,我們開始標記資料集,使用智慧多邊形來幫助加快這個過程。

在標記了大約 30 張圖片後,我們訓練了一個初始模型,目的在幫助我們標記下一個迭代,並發現模型需要改進的地方。
我們的初步模型訓練,取得了令人印象深刻的結果,mAP(平均精確度)達到了 83.7%。從測試集的結果來看,它的表現還不錯,但仍有改進的空間。
從結果來看,我們可以看到模型主要難以辨識平交道和車站月台。為了幫助模型更好地學習這些區域,我們並沒有從整個行程中採樣 50 張圖像,而是以更高的每分鐘採樣率,從一個車站到另一個車站採樣 50 張圖像。這樣,模型就有更多包含月台,和平交道的訓練資料可供學習。
我們重複了幾次這個過程,經過幾次迭代後,在包含 200 張標籤影像的資料集中,我們獲得了 89.5% 的 mAP,提升了約 7%。查看測試樣本的結果,我們發現模型對月台、軌道邊緣和平交道的偵測更加流暢、準確且一致。

現在我們可以繼續偵測人員和車輛,以便正確辨識危險區域中的物體。
使用相同的影像數據,我們匯入了一系列在車站停靠,或經過車站的影像片段。這樣做是為了獲得專門包含人員的訓練數據,而這些人員大多在火車站。
由於 Roboflow Universe 上已經有一個用於人員檢測的資料集,我們使用該模型來快速標記影像。不到一個小時,我們就建立了一個性能非常出色的模型。

利用電腦視覺檢測客運列車事故
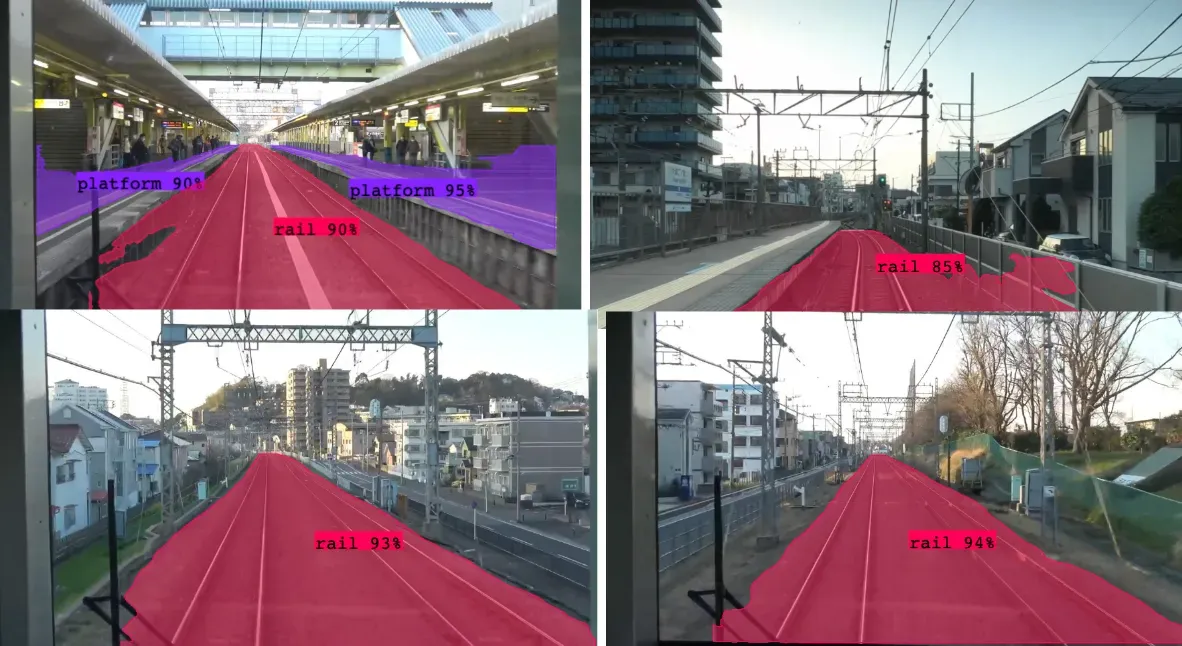
現在,我們可以持續監測乘客所在位置、他們應該在的位置(月台)、可能發生問題的位置(月台邊緣)、他們不應該在的位置,以及列車需要緊急停車的位置(軌道)。借鑒以往基於檢測的行動案例,我們將兩種模型結合起來,以探索建構安全系統所需的所有要素。

軌道/平台/交叉口實例分割和人員/車輛偵測均以 30 FPS 運作。
雖然對影像進行推理,確實揭示了模型的一些改進空間,但它確實準確地檢測到了大多數關鍵區域,這應該能夠追蹤人員實例(標記為綠色)開始離開站台(標記為黃色)或進入軌道(標記為紅色)的位置,從而觸發相應的警報。
為了達到我們的目的,我們將每個人邊界框的中央底部(通常與他們的腳有很好的對應性)作為他們站立的位置。我們可以將這些點與實例分割模型的結果進行比對,以判斷他們是安全地站在月台上,還是處於需要採取行動的位置。

這是人工智慧增強圖像範例,展示了軌道上有人的危險情況。
透過使用生成式影像模型,我們可以編輯現有的真實影像,創建模擬不安全情況的影像。在本例中,我們看到大多數人安全地站在標記為站台的區域(綠點)內,但有一人站在標記為軌道的區域(紅點)內。
這時,由電腦視覺驅動的列車的快速反應時間,可以觸發盡可能多的必要措施以確保安全,例如觸發緊急煞車和喇叭,以及其他措施,包括警告司機和車站工作人員、警告急救人員等等。
結論
對此用例的進一步探索,可能涉及對走得太靠近月台邊緣的乘客,進行預先自動語音警告、直接連接到平交道口的電腦視覺系統等等。
使用 Roboflow 和電腦視覺,我們不僅能夠建立一個可能挽救生命的安全系統,而且能夠非常快速地完成這一目標,而且不需要多年的建設和數億美元的額外建設。
 |
iF+ 系列雙系統免接觸式智慧門鎖
(請點擊 ↑ 連結詳細介紹) |
0 comments:
張貼留言