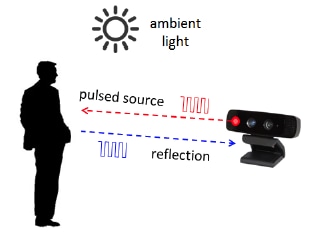
圖1:3D飛行時間攝影機操作。

Klacci 凱樂奇交通運輸業解決方案
1. 介紹
3D 飛行時間(TOF)技術,正在使用低成本的 CMOS 像素陣列,和有源調製光源提供 3D 成像,正在革新機器視覺行業。 結構輕薄短小,易於使用,加上高精度和幀率,使 TOF 攝影機成為廣泛應用,有吸引力的解決方案。 在本報導中,我們將介紹 TOF 操作的基礎知識,並將 TOF 與其他 2D/3D 視覺技術進行比較。 然後探索了受益於 TOF 感測的各種應用,如手勢、3D掃描和列印。 最後,提供了幫助讀者開始使用德州儀器的 3D TOF 解決方案的資源。
2. 操作理論
3D 飛行時間(TOF)攝影機的工作原理,是使用調製光源照亮場景,並觀察反射光。 測量照明和反射之間的相移,並轉換為距離。 圖1 說明了 TOF 的基本概念。 通常,照明來自在人眼看不見的近紅外線範圍(~850nm)執行的固態雷射器或 LED。 目的在反應處理相同光譜的成像感測器,接收光並將光子能量轉換為電流。 請注意,進入感測器的光線,有一個環境分量和一個反射分量。 距離(深度)資訊僅嵌入反射元件中。 因此,高環境分量降低了信噪比(SNR)。
為了檢測照明和反射之間的相移,光源由連續波(CW)脈衝或調製,光源通常是正弦波或方波。 方波調製更常見,因為它可以使用數位電路輕鬆實現。
脈衝調製可以透過從反射光中整合光電子,或在首次檢測反射時,啟動快速計數器來實現。 後者需要一個快速的光探測器,通常是單光子雪崩二極體(SPAD)。 這種計數方法需要快速的電子裝置,因為達到 1 毫米的精度需要計時 6.6 皮秒的脈衝。 在室溫下,在矽中幾乎不可能達到這種精度水準。
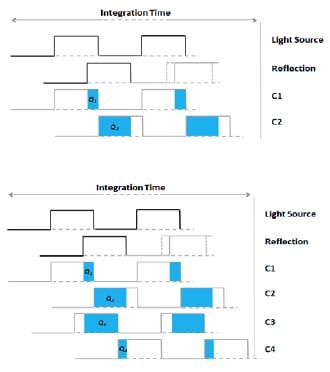
圖2:兩種飛行時間方法:脈衝(頂部)和連續波(底部)。
脈衝方法很簡單。 光源照明時間很短(â^†t),反射能量在每個畫素上並行取樣,使用兩個異相視窗 C1和C2,具有相同的 â^†t。 測量這些樣品 Q1 和 Q2 期間累積的電荷,並使用以下公式計算距離:
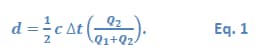
相比之下,CW 方法每次測量多個樣本,每個樣本的相位步進 90 度,總共有四個樣本。 使用該技術,照明和反射之間的相位角 φ,以及距離 d 可以計算出
因此,測量的畫素強度(A)和偏移量(B)可以透過以下方式計算:
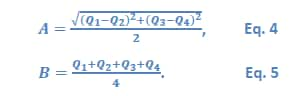
在所有方程中,c 是光速常數。
乍一看,與脈衝方法相比,CW 方法的複雜性似乎不合理,但仔細觀察 CW 方程會發現,(Q3-Q4)和(Q1-Q2)減少了測量中恆定偏移的影響。 此外,相位方程中的商減少了距離測量的恆定增益的影響,如系統放大和衰減或反射強度,這些是理想的屬性。
反射振幅(A)和偏移量(B)確實會影響深度測量精度。 深度測量方差可以透過以下方式近似:
調製對比度,ð'ð'',描述了 TOF 感測器分離和收集光電子的程度。 反射振幅,ð´,是光功率的函式。 偏移量,ðμ,是環境光和殘餘系統偏移的函式。 人們可以從方程6中推斷出,高振幅、高調製頻率和高調製對比度會提高精度;而高偏移會導致飽和並降低精度。
在高頻下,由於矽的實體特性,調製對比度可以開始減弱。 這給調製頻率設定了實際上限。 滾動頻率高的 TOF 感測器通常可以提供更高的精度。
事實上,CW 測量是基於相位,每 2Ï€ 環繞一次,這意味著距離也將有一個鋸齒距離。 發生別名的距離稱為歧義距離,ô€€ƒamb,定義為:

由於距離是包裹,ô€€ƒamb 也是最大可測量距離。 如果一個人希望延長可測量的距離,可以降低調製頻率,但要以降低精度為代價,如方程 6 所述。
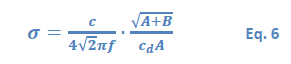
先進的 TOF 系統沒有接受這種妥協,而是佈署了多頻率技術,在不降低調製頻率的情況下延長距離。 多頻率技術的工作方式,是在混合中新增一個或多個調製頻率。 每個調製頻率,將有不同的歧義距離,但真實位置是不同頻率一致的位置。 當兩個調製一致時,稱為節拍頻率的頻率通常較低,並對應於更長的模糊距離。 雙頻概念如下所示。
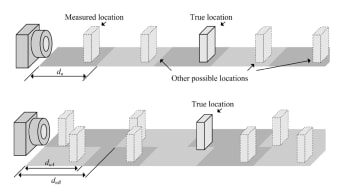
圖3:使用多頻率技術延長距離[6]。
3. 點雲
在 TOF 感測器中,測量 2D 可尋址陣列中每個畫素的距離,從而形成深度圖。 深度圖是 3D 點的集合(每個點也稱為體素)。 例如,QVGA 感測器的深度圖為 320 x 240 體素。 深度圖的 2D 表示是灰度影象,如圖 4 中的蘇打水罐示範案例所示,強度越亮,體素越近。 圖 4 顯示了一組蘇打水罐的深度圖。

圖4:蘇打水罐的深度圖。
或者,深度圖可以在三維空間中呈現為點的集合或點雲。 3D 點可以透過數學連線來形成一個網格,紋理表面可以對映到網格上。 如果紋理來自同一主題的即時彩色影像,則會出現栩栩如栩如生的 3D 渲染主題,如圖 5 中的頭像所示。 人們也許能夠旋轉頭像來檢視不同的視角。
圖5:由點雲形成的頭像。
4. 其他視覺技術
飛行時間技術,並不是唯一可用的視覺技術。 在本節中,我們將 TOF 與經典的 2D 機器視覺,和其他 3D 視覺技術進行比較。 本節末尾包含一個總結比較的表格。
2D 機器視覺
今天佈署的大多數機器視覺系統都是 2D 的,當照明受到密切控制時,這是一種具有成本效益的方法。 它們非常適合使用眾所周知的影像處理技術(如邊緣檢測、模板搭配和形態開/閉)檢測缺陷的檢查應用。 這些演算法提取關鍵特徵參數,這些引數與資料庫進行比較,以確定透過-失敗。 為了檢測z軸沿線的缺陷,通常會部署額外的 1D 感測器或 3D 視覺。
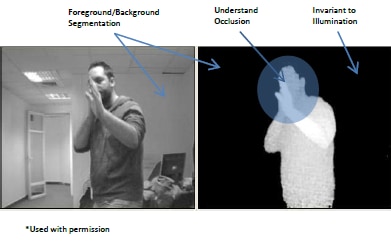
在先進的影像處理演算法的幫助下,2D 視覺也可以用於非結構化環境中,以繞過由不同照明和陰影條件引起的併發症。 以圖 6 中的影像為例。 這些影像來自同一張臉,但在非常不同的光線下。 陰影差異甚至會使人臉辨識變得困難。
相比之下,使用來自 TOF 感測器的點雲資料的電腦辨識,在很大程度上不受陰影的影響,因為照明由 TOF 感測器本身提供,深度測量是從相位測量中提取的,而不是影象強度。

圖6:相同的臉,不同的陰影。
3D 機器視覺
強大的 3D 視覺克服了 2D 視覺的許多問題,因為深度測量可用於輕鬆將前景與背景分開。 這對場景理解特別有用,第一步是將感興趣的主題(前景)與影像的其他部分(背景)分開。
例如,手勢辨識涉及場景理解。 使用距離作為判別器,TOF 感測器使臉部、手和手指與影像的其餘部分分離,因此可以高度自信地實現手勢辨識。
怎麼樣的味道?
在接下來的兩個小節中,我們將把 TOF 技術與其他兩種 3D 視覺技術進行比較:立體視覺和結構化光。
立體視覺與 TOF
立體視覺通常使用兩個相隔相隔的攝影機,物理排列方式與人眼相似。 給定空間中的點狀物體,攝影機分離將導致兩個攝影機,影像中物體位置的可測量差異。 使用一個簡單的針孔攝影機模型,可以計算每張圖片中的物體位置,我們將用 α 和 β 表示它們。 有了這些角度,可以計算出深度 z。
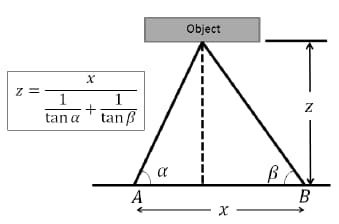
圖8:無菌--透過差異測量的深度。
立體視覺的一個主要挑戰是解決對應問題:在一張圖片中給出一個點,如何在另一支攝影機中找到相同的點? 在建立對應關係之前,差異和深度都無法準確確定。 解決對應問題涉及用於特徵提取,和匹配的複雜、計算密集型演算法。 特徵提取和匹配,還需要影像中足夠的強度和顏色變化,以實現穩健的相關性。 如果主體缺乏這些變化,這一要求會降低立體視覺的有效性 —— 例如,測量與均勻顏色的牆壁的距離。 TOF 感測沒有這種限制,因為它不依賴於顏色或紋理來測量距離。
在立體視覺中,深度解析度誤差是距離的二次函式。 相比之下,在反射光下工作的 TOF 感測器對距離也很敏感。 然而,不同的是,對於 TOF 來說,這種缺點是在必要時,透過增加照明能量來補救的;TOF 將強度資訊用作「置信」指標,以使用 Kalman 濾波器類技術最大限度地提高準確性。
立體視覺有一些優點。 實施成本非常低,因為可以使用最常見的現成攝影機。 此外,類似人類的物理配置,使立體視覺非常適合捕捉影像,以直觀地呈現給人類,因此人類和機器都在看相同的影像。
結構化光與 TOF
Structured-Light 的工作原理,是將已知的模式投射到主體上,並檢查模式失真。 通常需要連續投影編碼或相移模式,來提取單個深度幀,這會導致較低的幀速率。 低幀率意味著主體在投影序列中,必須保持相對靜止,以避免模糊。 反射模式對環境的光學干擾很敏感;因此,結構化光往往更適合室內應用。 結構化光的一個主要優點是,它可以透過使用現成的 DLP 投影機和高畫質彩色影像,實現相對較高的空間(X-Y)解析度。 圖 9 顯示了結構化光的概念。
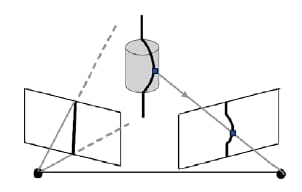
圖9:結構化光概念。
相比之下,TOF 對機械對齊和環境照明條件不太敏感,機械更緊湊。 目前的 TOF 技術的解析度,低於今天的結構化光,但正在迅速改進。
表1 總結了 TOF 攝影機,與立體視覺和結構化光的比較。 關鍵的收穫是,TOF 是一種具有成本效益、機械輕薄短小的深度成像解決方案,不受不同環境照明的影響,並大大簡化了場景理解中,通常需要的圖形-地面分離。 這種強大的組合,使 TOF 感測器非常適合各種應用。
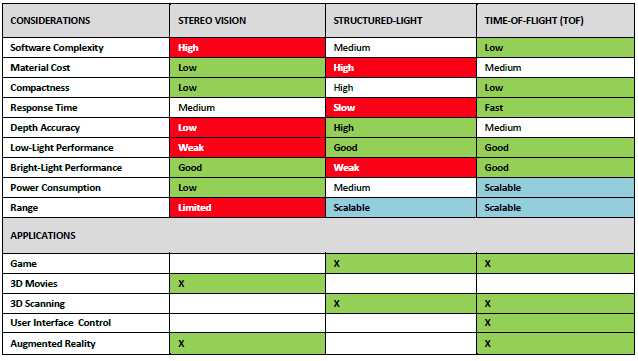
圖10:3D成像技術的比較
5. 應用程式
TOF 技術可以應用於,從汽車到工業到醫療保健,再到智慧廣告、遊戲和娛樂等應用。TOF 感測器也可以作為,固定和行動式計算裝置的絕佳輸入裝置。 在汽車領域,TOF 感測器可以實現自動駕駛,並提高周圍對安全的認識。 在工業領域,TOF 感測器可以用作 HMI,並用於在人類和機器人可能需要近距離工作的自動化單元中,執行安全包絡。 在智慧廣告中,使用 TOF 感測器作為手勢輸入和人類辨識,數位看板可以變得高度互動,針對特定的直播觀眾的媒體內容。 在醫療保健領域,手勢辨識提供了非接觸式人機互動,營造了更衛生的操作環境。 手勢能力特別適用於消費電子產品,特別是在遊戲、行動式計算,和家庭娛樂方面。TOF 感測器自然介面,為第一人稱視訊遊戲,提供了一個直觀的遊戲介面。 同樣的介面也可以取代遙控器、滑鼠和觸控式螢幕。
一般來說,TOF 應用程式可以分為手勢和非手勢。 手勢應用強調人際互動和速度;而非手勢應用強調測量精度。

圖11:TOF 技術適用於廣泛的應用。
手勢應用
手勢應用程式將人類的動作(臉部、手、手指或全身)轉化為符號指令,以命令遊戲機、智慧電視或行動式計算裝置。 例如,頻道衝浪可以透過揮手來完成,演示可以透過手指閃爍來滾動。 這些應用程式通常需要快速的反應處理時間、中低、釐米級精度和功耗。


圖13:使用 3D-TOF 感測器和 SoftKinetic iisu® 中介軟體進行手勢辨識。
非手勢應用
TOF 感測器也可以用於非手勢應用。 例如,在汽車領域,TOF 攝影機可以透過在檢測到汽車附近的人和物體時,提醒駕駛員來提高安全性,並在電腦輔助駕駛中提高安全性。 在機器人和自動化中,TOF 感測器可以幫助檢測產品缺陷,並執行人類和機器人近距離工作所需的安全包絡。 隨著 3D 列印迅速變得流行和實惠,TOF 攝影機可用於執行 3D 掃描,以啟用「3D 影印機」功能。 在所有這些應用中,空間精度都很重要。

總結
在本報導中,我們介紹了 TOF 技術和操作理論。 我們還將 TOF 感測器與 2D 機器視覺,和其他 3D 視覺技術進行了比較,並強調了 TOF 感測器的差異化優勢。 我們還探索了 TOF 感測器啟用或增強的廣泛應用。 為了幫助讀者入門,我們引入了 TI 3D-TOF 晶片組和 CDK,以及第三方軟體資源。
商機探索 —— 橋樑巡檢必須用上哪些技術和設備?

0 comments:
張貼留言