無人機 - 它們是如何工作的?
 |
| 不只是縮時,還有粉塵、噪音、位移偵測 |
無人機是由飛行員或機載電腦遠端控制的機器人飛機。 它們可用於各種目的,包括監控、攝影和娛樂。
「德羅內斯」一詞實際上直接取自科幻世界。無人機用於拍攝、軍事監視和娛樂活動的原因有很多。無人機屬於航空航太、機器人和機電一體化的交叉點。 無人機可以從完全自主的軍用級無人機到你普通的遙控無人機,你可能會看到一個孩子在公園裡飛行。無人機的另一個名稱是無人駕駛飛行器(UAV)。 這些機器主要用於人類飛行員條件乾燥、沈悶或危險的情況。 然而,無人機一詞可能具有高度誤導性,因為有很多不同的型別。讓我們先看看構成傳統無人機的不同部分。

飛行無人駕駛飛行器(UAV)
無人機的一部分
我們將研究的無人機技術是任何普通人使用的標準消費者友好型無人機,口袋裡有一些額外的硬幣。 無人機的第一個也是最重要的部分是框架。 框架通常由塑膠或碳纖維製成,可以有不同的手臂變化(三、四、六角、八度)。 每隻手臂的末端都裝有電機和螺旋槳,而中心則裝有飛行控制器、萬向節和其他電子齒輪。 大多數重量應該位於船的中心,因為這透過保持重心集中來獲得最佳飛行特性。 與與無人機有關的所有部件一樣,重量很大。 框架越重,可以實現的升力就越少。 然而,您不希望有一個超級輕便的框架,該框架會在撞擊時斷裂。 碳纖維因其強度和最小重量而成為最受歡迎的纖維。
下一個最重要的部分是電機。 每個刀片/臂都有一個單獨的電機。 電機決策基於所需的功率,以及您希望電機執行什麼。如果正在建造一個多轉子來承載重有效載荷並保持最佳飛行時間,那麼更慢的旋轉、更高的扭矩電機是理想的選擇。然而,相比之下,你可能想要一個具有大量機動性和更快旋轉轉子系統的侵略性、快速的系統。RPM的測量值或轉子的速度是 kV 值。 更快的版本將超過 1400kv,而電池壽命較長的慢無人機在 300-900kv 範圍內。 只有當正確的電池和螺旋槳相應地補充無人機時,這些數字才能正常工作。
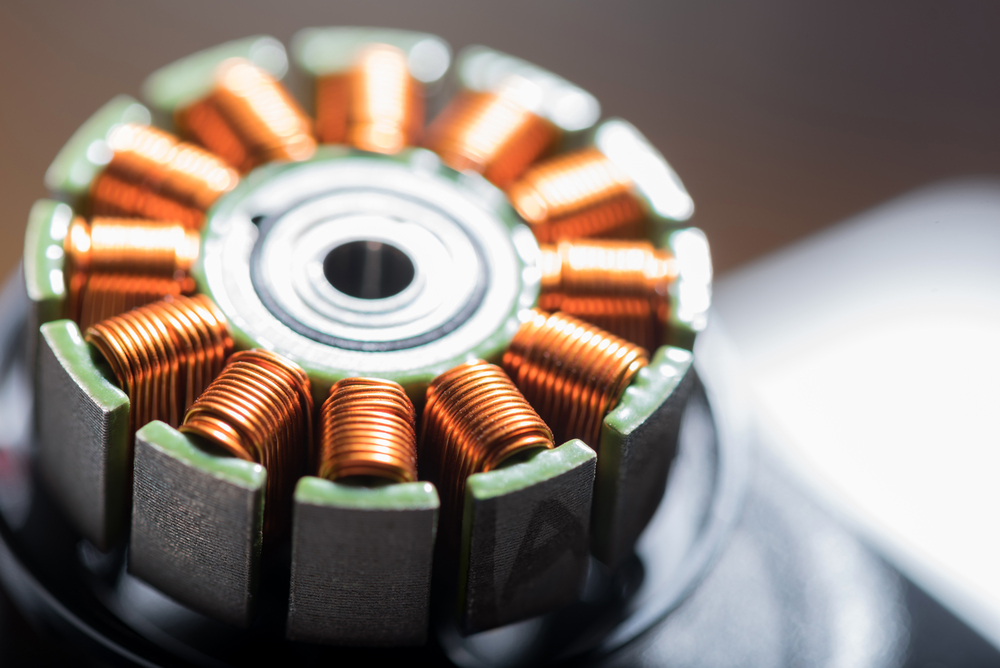
無人機馬達(圖片來源:YAKOBCHUK VIACHESLAV/Shutterstock)
螺旋槳是無人機的機翼,也可以由塑膠或碳纖維製成。碳纖維是高階選擇,但更昂貴。挑選螺旋槳時,請務必檢查你的框架是否可以容納你選擇的尺寸。 大多數框架將為它們分配最大螺旋槳尺寸。螺旋槳的尺寸也應符合你的預期用途。如果你希望有一個更激進的構造,請選擇光譜較小端的螺旋槳。 對於更高的有效載荷、較長的飛行時間構建來說,情況正好相反。 螺旋槳通常成對包裝,一個是CW(順時針)旋轉道具,另一個是 CCW(逆時針)。 無人機的動力來自其電池,電池的重量和容量多種多樣。總是選擇最大容量的電池來實現最長的飛行時間似乎是直觀的,但情況並非總是如此。隨著電池容量的增加,其重量也隨之增加。在某一點上,更多的產能不再有益,好處開始減少。這是一個被忽視的細節,可能會給人們帶來麻煩。如果你想要高容量 10,000 毫安時 6 秒的電池,請確保你的電機和 ESC 是 6s,並且你的飛行控制器可以支援它。

無人機螺旋槳(圖片來源:jordeangelovic/Shutterstock)
無人機對控制非常重要的部分是電子速度控制器,它將執行你的電機。ESC 根據它們可以持續向電機系統供應的電流量進行評級。由於電機不斷以不同的速度旋轉,它們需要一個速度控制器來向他們規定該速度。如果電機都以相同的速度執行,你總是會盤旋。由於我們沒有改變轉子的間距,系統的音高是透過電機轉速的差異來控制的。強烈建議使用四個相同的 ESC。
發射器和接收器有助於無人機和控制無人機之間的通訊。發射機「傳輸」訊號,接收器「接收」訊號。接收器連線到飛行控制器;它提供這些輸入,然後輸出對電機的響應。發射機的選擇更基本一點。發射機的選擇通常基於操作所需的通道數量。對於多轉子無人機,最低限速為四個(滾動、瀝青、偏航和油門)。擁有更多總是很方便的。 一個單獨的通道也可以用於自動駕駛、操作相機萬向節、可伸縮起落架等。
飛行機制
既然你對多轉子無人機的不同部分有了基本的瞭解,現在是時候討論所有這些部件如何結合在一起實現飛行了。讓我們用四軸飛行器來執行以下示例。 四軸飛行器使用四個不同的螺旋槳,由四個不同的電機驅動,位於四個獨立的臂上。簡單,對吧? 每個旋轉螺旋槳都會產生自己的扭矩。 牛頓第三定律指出,「每一次行動都有平等和相反的反應。」 因此,如果螺旋槳在旋轉,持有它的手臂也會想朝相反的方向旋轉。 這是扭矩反應定律,這就是為什麼傳統直升機有一個尾轉子,以補償機身扭矩。
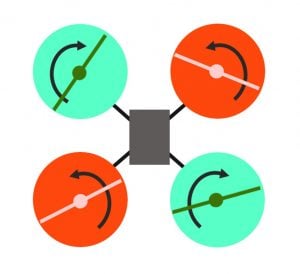
螺旋槳的旋轉
在四軸飛行器中,我們不需要尾旋翼。你知道為什麼嗎? 因為我們可以以相等和相反的扭矩(相反的螺旋槳)來對抗每螺旋槳的扭矩。相鄰的螺旋槳抵消了彼此的扭矩效應。這使得四軸飛行器能夠異常很好地盤旋。如果你懸停在直升機上,施加更多的動力,就會有更多的扭矩,尾部轉子需要更多的動力。這需要很多小時才能掌握,特別是為了使它看起來光滑。這些問題在多轉子無人機中不存在,因為在螺旋槳系統中,功率增加總是平等和相反。我們想做的不僅僅是懸停在我們的多轉子上。如果我們想向前移動,那麼兩個前螺旋槳都會消耗更少的功率,而後螺旋槳會增加更多。 這個原則適用於所有滾動方向。
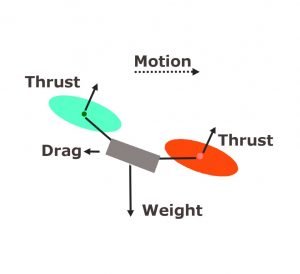
無人機運動背後的物理學插圖
然而,偏航運動是不同的。 下圖描述了如果我們希望我們的飛船向左偏航會發生什麼,這意味著我們希望扭矩反應在左側方向更加突出。 因此,四軸飛行器為具有左扭矩方向的螺旋槳(順時針旋轉螺旋槳)提供更多動力。上升和下降非常簡單。功率要麼增加到整個螺旋槳系統上升,要麼減少以下降。
你還可以以多種方式駕駛四軸飛行器。你可以在上升時緩慢地偏航,同時輕微滾動。 飛行電腦中內建的演算法和程式考慮了這些方向,並對每個螺旋槳施加必要的功率。這使四軸飛行器能夠保持穩定平穩的飛行。考慮到這一切,下次你出去駕駛無人機時,你會確切地知道駕駛無人機需要多少計劃和微妙的技術!

0 comments:
張貼留言