Starlight Technology - 5 百萬像素 安控攝影機
Starlight Technology - Nexlar Security Cameras 5 Megapixel

隨著感測器技術的發展,安控攝影機的弱光性能得到了極大的提升。在黑暗的環境中,借助微弱的光線,甚至是星光,攝影機仍能拍攝出清晰多彩的監控畫面。多家中國製造商推出了全彩攝影機。安控影像監控已進入星光全彩時代。
與傳統紅外線夜視儀相比,星光全彩攝影機的優勢在於:
- 圖像的色彩比紅外線黑白圖像多。即時監控,調查取證後可獲得更多資訊;
- 無需額外的紅外燈,無光污染,隱蔽性更好;
- 無需額外補光燈,夜間功率相對更小,更有利於 POE 供電,同時發熱量更小,攝影機和系統更穩定可靠;
- 不會有傳統紅外線攝影機的紅外線過曝、手電效應等缺陷,看的更清楚。
- 一些特殊場景應用。比如晚上在停車場,打開大燈後,紅外線攝影機可能根本看不到車牌和車頭。全彩攝影機完美解決了這個問題,車牌和車頭清晰可見。
在討論星光全彩技術之前,我們先來了解幾個基本概念。
照度
照度是單位面積接收到的光通量。單位是勒克斯(lux=勒克斯)。
一根蠟燭照亮1平方米的區域,呈現的亮度約為1勒克斯。
下表是一些常見場景的照度值
| 照度(勒克斯) | 光照條件 |
| 100 000 | 烈日 |
| 50 000 | 手術室 |
| 10 000 | 晴朗的天空 |
| 500 | 辦公室 |
| 5 | 路燈 |
| 0.2 | 滿月 |
| 0.02 | 月夜 |
| 0.0002 | 星光 |
當然,以上照度值只是一個參考值,並不是那麼準確。同樣,在影像監控領域,什麼照明攝影機才算星光也沒有明確的標準,後面會詳細討論。一般來說,攝影機的靈敏度主要取決於鏡頭和圖像感測器。指定的勒克斯值越低,攝影機的靈敏度就越好。
通常,製造商會指定攝影機產生可接受圖像所需的最低照明水準。雖然這些規格有助於比較同一製造商生產的攝影機的感光度,但它們對於比較不同製造商的攝影機卻不是那麼有用。這是因為不同的製造商使用不同的測量方法,並且對生成可接受的圖像有不同的標準。
STARVIS
星光攝影機的概念一直是在安控領域,但更專業的系統的名字來源於 SONY。
索尼將一些自家的背照式 CMOS 感測器命名為具有出色低照度性能的 starvis 系列。這是星光全彩攝影機命名的來源。
對於 Starvis,索尼官方的解釋是 Visibility under the star light,意思是星光下的能見度。當然,業內有一種解釋是 starvision。索尼註冊有 starvis 標誌,一般不允許未經授權隨意使用。因此,很多廠商將它們分別命名,如上述安訊士的 Lightfinder、海康威視的 colorVU、大華的 Full-color、宇視的 LightHunter。
關於 Starvis 技術,索尼將其定義如下: STARVIS 是用於安全攝影機應用的 CMOS 圖像感測器的背照式像素技術。它具有每 1 µm2 2000 mV 或更高的靈敏度(彩色產品,當使用 706 cd/m2 光源成像時,1 s 累積等效 F5.6),並在可見光和近紅外光中實現高畫質光區。
該技術主要用於背照式 CMOS 感測器,因為它可以接收來自感測器矽基板背面的光,增加進光量,減少光損失,提高靈敏度。
每 1µm2 面積靈敏度為 2000mV 及以上的感測器稱為 starvis 感測器。如何衡量不同 starvis 感測器的性能差異?索尼提出了 SNR1s 的概念。
Starvis2
2021 年,索尼將 starvis 更新為 starvis2。與 STARVIS 相比,Starvis2 具有超過 8dB 的寬動態範圍(AD12bit),在單次曝光中具有相同的像素大小。
STARVIS 2 的完整定義,是用於安控攝影機應用的 CMOS 圖像感測器的背照式像素技術。它具有每 1 µm2 2000 mV 或更高的靈敏度(彩色產品,當使用 706 cd/m2 光源成像時,1 秒累積等效 F5.6)。與 STARVIS 相比,單次曝光同樣像素尺寸的情況下,其動態範圍(AD12bit)超過 8dB,在可見光和近紅外光區域實現高畫質。
信噪比1
索尼正在引入 SNR1s [lx] ,作為用於在低照度下定量評估圖像品質的指標。SNR1s [lx] 是索尼倡導的專有指標,僅限於用於安控攝影機應用的 CMOS 圖像感測器。
較小的值表示在低照度下的圖像品質更好。
SNR1s [lx] 是由「SNR」(信噪比)、「1」(表示噪聲 = 1 時的信號電平為 1)和「s」(安全性)組成的首字母縮寫詞。
SNR1s [lx] 規定條件
| 應用 | 監視器 |
| 光源 | 3200 [K] |
| 目標對象 | 18% 灰色 |
| F號 | 1.4 |
| 曝光時間 | 1/60 [秒] |
| 線性矩陣 | 沒有 |
| 信號 | G [e-](感測器原始輸出) |
| 噪音 | √Shot Noise[e-] 2 + Dark Noise[e-] 2 |
| 信號:噪聲 | 1:1 |
SNR1s 測量方法示意圖
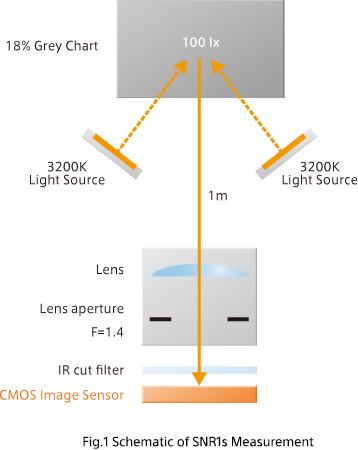
兩個 3200 [K] 光源從不同方向照亮 18% 灰度圖,調光到 100 [lx]。放置攝影機,使灰度圖到圖像感測器的成像表面的距離為 1 m,測量靈敏度 [e-] 和暗噪聲 [e-],並使用關係式計算 SNR1s [lx]方程。等式等於 1 時的亮度為 SNR1s [lx]。
 |
沒有留言:
張貼留言