Indoor positioning technologies review
室內定位技術

一、簡介
如今,得益於新技術,借助智慧手機或平板電腦等行動設備,幾乎每時每刻都可以獲取有關我們位置的資訊。這些設備可能包括許多感測器,例如全球定位系統 (GPS)/全球導航衛星系統 (GNSS) 晶片組、慣性測量單元 (IMU) 平台、氣壓計、高度計、相機等,使客戶能夠計劃他們的活動(例如,知道需要等火車的時間)或在社交網路(例如 Facebook)上分享他們的位置。有了這些類型的感測器和新定位技術的興起,可以在室外和室內場景中獲取位置。在第一種情況下,即使存在一些問題,尤其是在惡劣環境中,由於多徑或衛星障礙,GPS/GNSS 也是獲取快速位置的最有用的感測器。在第二種情況下,這些感測器變得無用,因為看不到衛星:因此,可以藉助其他感測器(如 IMU 和相機)進行定位,並考慮其他技術,如基於圖像辨識 (IRB) 或行人航位推算 (PDR) 技術。
在本章中,我們將研究考慮智慧手機技術的室外和室內場景中的定位性能和方法。特別是,這項工作的目標是分析在兩種情況下,使用這些儀器可以實現的用於定位和導航目的的最先進的精度和準確度。
在第 2 節中,分析了安裝在智慧手機中的最常見感測器,以及確定智慧手機參考系統的方法。我們將討論當今可用的 GNSS 晶片組(第 2.1 節)以及當今使用這些感測器和 INS 平台可獲得的定位精度(第 2.2 節)。此外,還簡要介紹了當今安裝在智慧手機中的攝像頭,以便使用圖像進行定位(第 2.3 節)。
隨後,在第 3 節中描述了當今可透過智慧手機獲得的定位技術,並提供了一些實際示例:展示了執行的測試和獲得的結果,重點關注室外(第 3.1 節)和室內(第 3.2 節)場景.
最後,將在第 4 節中得出一些結論。
2. 智慧手機上的感測器
目前智慧手機上有許多感測器:其中大部分與內部應用(接近感測器、光感測器等)有關,而其他感測器(例如,GNSS、INS 和相機)允許獲得定位。最大的問題之一是安裝在智能手機內部的操作系統 (OS):每個操作系統都有不同的方式來管理來自內部感測器的數據,更不用說應用程序對這些數據的使用了。
雖然感測器可用性因設備而異,但在 iOS 和 Android 版本之間也可能有所不同。由於幾個平台版本,在最後一個操作系統中進行了最大的更改:在 Android 1.5(API 級別 3)中引入了許多感測器,即使其中一些感測器在 Android 2.3(API 級別 9)之前沒有使用並且無法訪問。類似地,在 Android 2.3(API 級別 9)和 Android 4.0(API 級別 14)中引入了一些其他感測器,而其他一些感測器已被移除,並替換為更新的感測器。
圖 1顯示了每個感測器在逐個平台的基礎上的可用性,考慮到僅涉及感測器更改的四個平台。
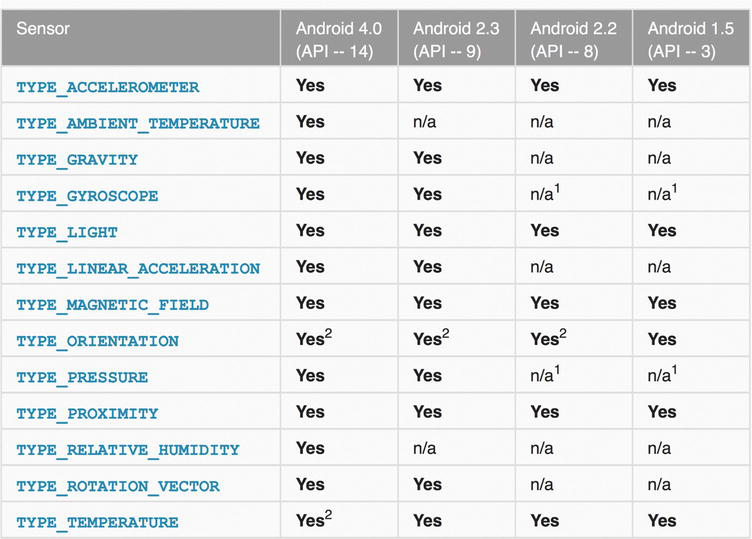
圖1。
每個
感測器在不同 Android 系統中的可用性(可在以下位置獲得:
在本章中,我們只關注對定位有用的感測器:GNSS 和 INS 晶片組,以及用於圖像的相機。在下文中,提供了這些感測器的簡要描述。
2.1. GPS/GNSS 晶片組
GPS/GNSS 晶片組是智慧手機中安裝最廣泛的感測器。當今市場上有許多晶片組可用,而且每個製造商經常安裝相同 GNSS 品牌的幾個不同版本。例如,Apple 安裝了 Broadcom Corporation 提供的晶片,而具有 Android OS 的三星智慧手機安裝了 u‑blox AG 晶片組。自 2016 年以來,智慧手機或桌子等行動平台無法獲取 GNSS 原始數據,但從 2016 年開始,還可以從搭載 Android 7.0 操作系統的智慧手機中,提取偽距和載波相位測量值。谷歌在 5 月 18 日至 20 日舉行的為期 3 天的開發者大會 I/O 2016 期間宣布了這一消息。這是一項非常強大的創新,注定會在測量和地理定位領域帶來一場革命:有了這些感測器,即使使用行動設備也可以獲得幾厘米的精度。儘管如此,本章不會分析這種可能性。
2.2. INS
慣性測量單元平台越來越多地與其他儀器(通常是 GNSS、里程計和磁力計)或儲存單元整合使用。然後它們形成一個慣性導航系統(INS)。
一般來說,INS 儀器由三個加速度計、三個陀螺儀和三個磁力計組成。簡要描述了這些感測器的特性。
加速度計是測量加速度(速度變化率)並幫助手機區分上下的儀器。
所有加速度計都有兩個基本部分:
我們要測量其加速度的物體的外殼附件。
一個品質,雖然拴在外殼上,但仍然可以移動。
例如,讓我們假設一個彈簧和一個重球。如果向上移動外殼,球會滯後於拉伸彈簧。如果我們測量彈簧的拉伸程度,我們就可以計算出重力。
陀螺儀是也可以提供方向資訊的感測器,但精度更高。多虧了這種特殊的感測器,Android 的 Photo Sphere 相機功能可以判斷手機旋轉了多少,以及向哪個方向旋轉。
數位羅盤通常基於稱為磁力計的感測器,它提供與地球磁場相關的簡單方向。因此,每部智慧手機都知道北方在哪裡,因此它可以根據其物理方向自動旋轉數位地圖。
2.3. 相機
與 GPS/GNSS 晶片組一樣,相機感測器是任何類型的大眾市場通信設備,尤其是智慧手機的必備組件。CMOS 圖像感測器 (CIS) 一直是我們手機中最重要的功能之一,因此它能夠將市場推向新的智慧手機類別,即所謂的拍照手機。Google Pixel、Apple iPhone 7 Plus、Samsung Galaxy S7、Huawei P9 和 Sony Xperia X 是在拉斯維加斯舉行的 2017 年國際消費電子展 (CES) 和 Mobile World 等國際行動行業大會上,評選的最佳拍照手機 2017 年巴塞隆納大會 (MWC)。
行動影像感知是商業用戶呈現現實、分享資訊、創造社交互動的更直接方式。由於這些原因,在過去幾年中,CIS 市場特別重視相機模組的品質,達到高解析度水平,並使其可用作眾多應用的低成本工具。結合陀螺儀、加速度計、接近感測器、GPS 接收器和 Wi-Fi 連接等,眾多嵌入式行器,這些新的相機晶片組促進了 3D 感測技術等新型應用的研發工作,如谷哥的 Tango、汽車自駕、無人機產品,以及虛擬和增強實境。晶片組架構中的大量技術升級,例如背面照明 (BSI) 和感測器內設置,就像雙攝影機的實現一樣,已經將市場推向了公司而不是另一個公司。如今,圖像晶片組的生產和技術領先者是索尼,佔據了整個市場的 35%。索尼的感測器安裝在眾多智慧手機和平板電腦中,如三星 Galaxy S7、華為 P9、索尼 Xperia X 等。之後,還有三星(三星 Galaxy S7、聯想 Vibe Shot)和 Omnivision(華為 P8、聯想 K3 Note)和,根據許多 CIS 市場研究公司的數據,這三者合計佔據了全球約 70% 的市場。
CMOS 代表互補金屬氧化物半導體,它使用與 CCD 感測器相同的製造技術,這是迄今為止的主導技術,但需要的功率要少得多,生產成本也更低。CMOS 成像器的主要優點是它們與主流矽晶片技術相容,這允許進行片上處理,從而實現小型化。隨著半導體產業技術的發展,CCD 與 CMOS 之間的差距已經縮小,獲得的圖像品質具有競爭力。

典型的 CMOS 是具有像素感測器陣列的整合電路,具有以下主要部分:
微透鏡
彩色濾光片
像素陣列
ADC(類比數位轉換器)
數位控制器
看看 2017 年最好的拍照手機,可以說明相機感測器的規格,並概述最佳特性。表 1恢復了一些智慧手機相機規格。
| CMOS影像感測器特性 | |||||||
|---|---|---|---|---|---|---|---|
| 手機 | 感測器名稱 | 尺寸(對角線)[mm] | d像素[µm] | CMOS技術 | 感測器尺寸 [mm × mm] | 圖像尺寸 [像素 × 像素] | 議員 |
| Google Pixel/BlackBerry Key One | 索尼 Exmor RS IMX378 | 7.81 | 1.55 | BSI CMOS | 6.25 × 4.69 | 4032 × 3024 | 12.2 |
| 蘋果 iPhone 6S | 索尼 Exmor RS IMX315 | 6.15 | 1.22 | BSI CMOS | 4.92 × 3.70 | 4032 × 3024 | 12.2 |
| 蘋果 iPhone 7 | 索尼 Exmor RS IMX* | 6.15 | 不適用 | 不適用 | 不適用 | 不適用 | 12 |
| 蘋果 iPhone 7 Plus | 索尼 Exmor RS IMX* | 5 | 不適用 | 不適用 | 不適用 | 不適用 | 12 |
| 三星 Galaxy S6、S6 Edge(+) | 索尼 Exmor RS IMX240 | 6.83 | 1.12 | BSI CMOS | 5.95 × 3.35 | 5312 × 2988 | 15.9 |
| 三星 Galaxy S7、S7 Edge | 索尼 Exmor RS IMX260 | 7.06 | 1.4 | BSI CMOS | 5.64 × 4.23 | 4032 × 3024 | 12.2 |
| 三星 Isocell S5K2L1 | 7.06 | 1.4 | 等離子電池 | 5.64 × 4.23 | 4033 × 3024 | 12.2 | |
| 華為P9 | 索尼 Exmor RS IMX286 | 6.2 | 1.25 | BSI CMOS | 4.96 × 3.72 | 3968 × 2976 | 11.8 |
| 一加 3T/LGV20/華為 Mate 8/華碩 Zenfone 3 | 索尼 Exmor RS IMX298 | 6.4 | 1.12 | BSI CMOS | 5.16 × 3.87 | 4608 × 3456 | 15.9 |
| 索尼 Xperia XZ | 索尼 Exmor RS IMX300 | 7.87 | 1.08 | BSI CMOS | 6.46 × 4.47 | 5984 × 4140 | 24.8 |
| 5.96 × 4.47 | 5520 × 4140(4:3 模式) | 22.8 | |||||
| 6.46 × 3.64 | 5984 × 3366(16:9 模式) | 20.1 | |||||
| Sony Xperia XZ Premium(即將推出) | 索尼 Exmor RS IMX400 | 7.73 | 1.22 | BSI CMOS | 6.17 × 4.63 | 5056 × 3792 | 19.2 |
| LG G4 和 G5 | 索尼 Exmor RS IMX234 | 6.83 | 1.12 | BSI CMOS | 5.95 × 3.35 | 5312 × 2988 | 15.9 |
表格1。
用於商用照相手機的 CMOS 圖像感測器特性。
有關相機的更多詳細資訊,請訪問以下超鏈接:
3. 智慧手機定位:室外和室內場景
當考慮室外場景時,智慧手機技術可以使用輔助 GPS (A-GPS) 系統提供具有相當高準確度的位置。儘管如此,接收到的 GPS/GNSS 信號,可能過於嘈雜或根本不可用,例如,如果用戶在城市峽谷或建築物內:在這些情況下,GNSS 定位是不可能的。
從那時起,許多研究人員一直在研究考慮不同感測器(如 INS 和圖像)和其他技術(如 Wi-Fi、行人跟踪系統、藍牙)的替代解決方案,以提高定位精度和可用性。以下小節簡要概述了當今使用通用智慧手機(選擇為代表)可獲得的精度。
3.1. 戶外場景
3.1.1. 僅 GPS/GNSS
如第 2.1 節所述,從 2016 年底開始,可以從智慧手機獲取原始 GNSS 測量值:主要問題是只有 Android Nougat OS 允許提取這些。因此,在本節中,注意力僅集中在智慧手機上安裝的軟體提供的內部解決方案上。為了分析今天使用 GNSS 內部晶片組可獲得的精度,進行了一些測試。
測試在 中描述的相同地方進行,考慮了兩種不同的場景:一個開放的室外區域代表「理想」條件(圖 2,左)和另一個具有特徵的區域(都靈理工大學校園的一個球場)城市峽谷(圖2,右)。圖 2 中的線 - 右側顯示了一個特定的軌跡,在該軌跡中可以找到衛星可見度有限的區域(類似於城市峽谷條件)和許多窗口,因為它們的高反射率會產生多徑。

圖 2。
測試場地和賽道:開闊的天空區域(左)和城市峽谷(右)。
透過將智慧手機安裝在特殊的「雙手」支架上,沿著相同的路徑行走,在這些區域進行動態測試,如圖 3所示。整個數據採集系統包括:
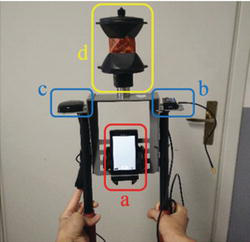
圖 3。
都靈理工大學開發的雙手支撐系統。
智慧手機(一)
360 度後向反射器 (d)
並允許安裝外部 IMU 平台 (b) 和外部 GNSS 天線 (c)。
GNSS 數據位置是在考慮到一秒採樣率的情況下,在調查期間記錄的,使用專用應用將國家海洋電子協會 (NMEA) GGA 消息儲存在 ASCII 文件中。由於安裝在「雙手」支架上的後向反射器,所有結果都與透過全站儀,連續追踪智慧手機位置,獲得的「地面實況」進行了比較。透過這種方式,考慮和估計儀器之間的水平臂偏移,獲得了毫米精度。
使用 MATLAB 編寫的軟體對 NMEA 句子進行分析,並與參考軌跡進行比較。
對於城市峽谷環境,代表性接收器的水平定位誤差如圖 4所示。
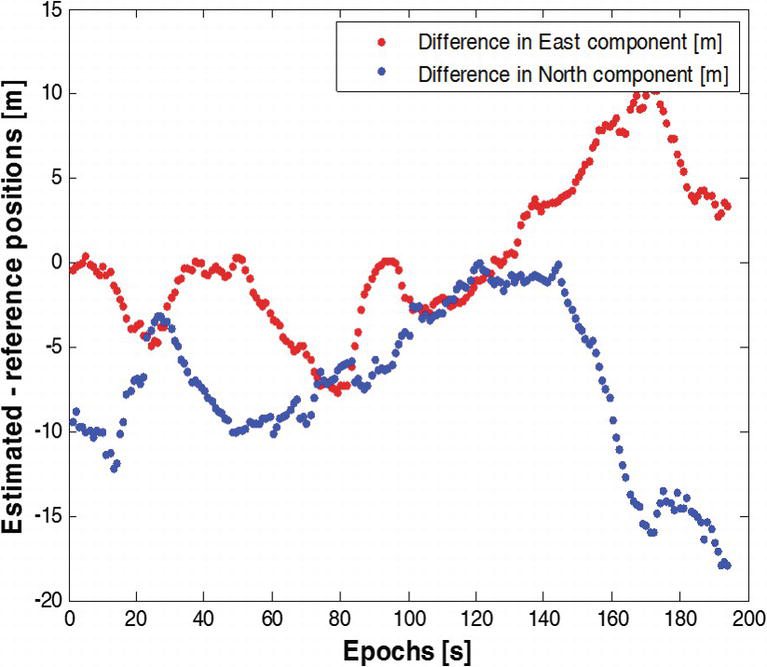
圖 4。
內部 GPS 感測器的 2D 性能。
為了從統計的角度進行更完整的分析,表 2匯總了城市峽谷和空地測試地點的最重要的統計參數。
| 手機 | 平均值(米) | 標準偏差 (m) | ||||
|---|---|---|---|---|---|---|
| 乙 | N | H | 乙 | N | H | |
| 城市峽谷環境 | 0.4 | −7.3 | −2.1 | 4.5 | 4.7 | 5.0 |
| 空地環境 | −0.5 | 1.6 | −1.9 | 2.6 | 2.5 | 4.5 |
表 2。
城市峽谷和開放區域環境中的誤差統計。
正如預期的那樣,通常可以肯定一些環境特徵,例如障礙物、多徑效應以及可追踪衛星的數量,在智慧手機定位的準確性確定中,起著非常重要的作用。
然而,考慮到可從內部感測器獲得的原始測量值,可以透過計算差分定位解決方案,來提高精度和準確度。
3.1.2. 全球導航衛星系統 + INS
在參考書目中經常可以找到兩種不同的 GNSS + INS 定位方法:鬆散 (LC) 和緊密 (TC) 耦合方法(圖 5)。
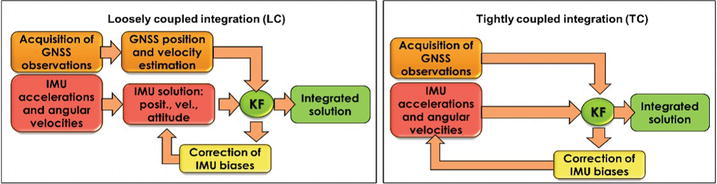
圖 5。
GNSS + INS 處理方法。
在第一種情況 (LC) 中,軟體整合加速度和角速度,並更新所有狀態參數。這些包括位置和角度資產,還有儀器偏差,使用 GNSS 位置和 IMU 測量。
在後一種(TC 方法)中,輸入參數相同,但 GNSS(偽距、載波相位、多普勒)和 IMU 觀測都進入擴展卡爾曼濾波器,每個都有自己的速率和精度,與它們的新的偏差,以提供獨特的解決方案。
雖然從計算的角度來看,這是一個較重的過程,它甚至考慮到使用一顆或幾顆可見的 GNSS 衛星,這是城市峽谷的典型情況
重要的是要強調目前唯一可用的 LC 方法,因為這種方法不需要原始 GNSS 測量,而對於 TC 而言,進行這些觀測非常重要。
從這一點開始,在本小節中,按照 LC 方法,對透過安裝在智慧手機上的 GPS + INS 儀器,獲得的結果進行了簡要分析。
考慮到在都靈理工大學地理資訊學實驗室,創建的相同特殊支持,測試是在我們的校園中,在上一小節中描述的相同的兩個不同測試站點中進行的。
考慮使用 Inertial Explorer ®軟體,對現場採集的所有數據進行後處理,考慮到 3 分鐘的會話持續時間,水平誤差環可能等於 4.21 m,垂直誤差環可能等於 3.73 m。顯然,如果考慮不同的智慧手機,結果會略有不同,但可以肯定這些值代表了當今可用的技術。
3.2. 室內場景
具有不同嵌入式感測器的智慧手機設備的普及、增強的計算能力和先進的連接功能,導致大量應用服務被引入市場,這些服務基於對用戶位置的感知,為環境中的導航提供資訊和幫助、姿態估計、追踪以及任何與空間上下文相關的服務。許多基於位置的服務 (LBS) 是作為資訊系統實現的,這些系統使用行動設備的位置作為先驗資訊。為商業目的佈署 LBS 解決方案的公司數量顯示,基於位置的解決方案終於滿足了市場需求,並將很快在大眾市場應用中實施。主要應用領域為醫療、環境輔助生活 、環境監測 、交通 和行銷等。
這些服務的主要部分,需要對人員、儀器、車輛、動物和資產進行準確定位。眾所皆知,GNSS 定位僅在開闊的天空環境中,才能提供良好的精度。相反,當考慮室內空間或城市峽谷時,GNSS 定位是不可能的,考慮到不同的技術和感測器,必須克服這個問題。近年來,一些室內基於位置的服務 (LBS) 已經開發出來,整合了不同的技術和測量,例如攝影機 、紅外線 (Kinect)、超音波、WLAN/Wi-Fi、RFID、行動通信等,是科學界為室內場所提供服務的技術示例。儘管有大量的解決方案,但室內定位的大眾市場應用,需要在商用智慧手機中使用嵌入式感測器,而無需額外的物理組件。因此,禁止對設備進行重大修改,並減少可用於這些應用的技術類型。參考總結了表 3 中,報告的大眾市場本地化系統的用戶需求。
與其他選項相比,所有這些室內定位系統各有利弊,使它們在特定場景中更有用。慣性導航系統是最有用,但最複雜的定位方法之一。該系統基於航位推算,使用安裝在智慧手機內的慣性測量單元,作為加速度計和陀螺儀來計算位置。使用 IMU (INS) 的系統的主要優點是,如今,每一種行動設備都已經在內部實現了它,並且不需要外部基礎設施。此外,對於慣性系統,唯一需要的輸入資訊是注視位置。無需任何其他外部資訊,該技術不受惡劣天氣條件或安全漏洞或干擾問題的影響。
然而,這些系統會受到積分漂移的影響,導致錯誤累積,因此必須由其他系統糾正。基於攝影機感測器的 LBS 具有很強的優勢,不需要在環境中安裝任何晶片組網路。所有主要感測器均已安裝在用戶設備中。在這種情況下,該系統可以被認為是低成本的。此外,與其他系統相比,這些系統的定位精度通常更準確。此外,這些基於三角測量的系統中的大多數,無法確定用戶的方向,在支持許多有用的應用 app(如增強現實)方面存在重大限制。基於攝影機感測器的 LBS 具有很強的優勢,不需要在環境中安裝任何晶片組網路。所有主要感測器均已安裝在用戶設備中。
現在很明顯,在複雜多變的環境中,提供可靠和穩定的位置資訊,是一項非常具有挑戰性的任務。感測器融合可能是結合兩種或多種不同技術(例如,到達角 (AoA)、飛行時間 (ToF)、接收信號直線指示 (RSSI))和技術(例如 GPS、Wi- Fi、藍牙、相機感測器、超音波)並最大限度地減少限制。一些方法和技術是支持或完成多模態方法中,其他導航或定位系統的理想候選者,以便在不使用分集的情況下,獲得優於透過每種技術、技術或系統參數獲得的位置資訊的準確性和可靠性。對於無法連接到一種以上技術,或沒有應用不同技術,所需的硬體增強功能的低端手機,採用不同感測器的多模解決方案是不可行的。由於這些原因,採用智慧手機技術的定位解決方案,利用了已經嵌入的感測器:INS、CMOS 圖像感測器和 Wi-Fi。
在本章中,我們將重點介紹以 CIS 作為主要感測器,基於圖像辨識 (IRB) 技術的解決方案。特別是,在對現有方法進行總體概述之後,我們將研究一種創新的 IRB 定位方法,該方法基於即時獲取的智慧手機圖片的圖像檢索,以及相應的合成生成的 3D 圖像或由數據庫,提取的 RGBD 圖像。然後,我們將評估 INS 的整合,以實現先前室內導航方法的多模態解決方案,最後對使用 Wi-Fi 技術作為主要定位技術的系統,進行一些考慮。
3.2.1. 相機 + INS
光學感測器的室內定位和導航正在成為主導技術之一,能夠以各種精度覆蓋大量應用領域。這些技術的成功歸功於 CMOS 感測器的改進和小型化。同時,數據傳輸速度和智慧手機計算能力得到提升,圖像處理領域也取得了顯著發展。
如前所述,基於相機感測器的 LBS 具有很強的優勢。首先,這些系統不需要在環境中安裝任何晶片組網路,因為主感測器 (CIS) 已經安裝在用戶設備中。這允許開發低成本服務而無需設計和實施現場網路。此外,與其他系統相比,這些系統的定位精度通常更準確。例如,在工業過程中,基於物體檢測算法的電腦視覺系統被用於生產線上的物體追踪和聘質檢查。這些類型的系統具有大約幾毫米的精度。當然,基於智慧手機的基於圖像的定位應用,無法達到這些精度水平,但可以完美匹配導航目的的要求。
已有許多基於室內圖像定位的研究,追求不同的目標,使用不同的方法和技術,也在研究小組感興趣的領域發揮作用。有視覺里程計方法、同步和位置映射 (SLAM) 、運動結構或調查語義特徵 。一些有趣的工作利用電腦視覺算法,特別是神經網路和遷移學習,用於視覺室內定位和分類。一些使用 RGB-D 圖像,來執行對象辨識。關於使用智慧手機作為導航設備,一些有趣的研究可以在。
從參考書目中可以看出,有許多基於圖像的 LBS,其精度和覆蓋範圍取決於應用。一些精度範圍可能適用於博物館或展覽等,非常大的室內空間中的應用,而其他精度範圍可能需要子房間級別的精度,例如在物流和優化領域。當試圖在更複雜的「搜救」任務空間,或建築工地進行室內定位和導航時,覆蓋面積減小,對精度要求更高。
考慮到安裝在智慧手機設備中的所有感測器,一種可能的解決方案是基於圖像辨識的方法,其中我們設備的定位基於攝影測量原理。基於圖像辨識(IRB)的定位,是智慧手機室內定位的一項很好的技術。這些過程的目的是透過行動設備,將用戶生成的查詢圖像,與具有位置資訊的現有圖像數據庫進行比對。
我們的校園已經按照中,介紹的方法進行了一些測試。在行動應用中使用 IRB 定位的特點,是可以使用單個攝影機;在此約束下,為了估計相機參數(位置和方向),必須以具有相關空間資訊的圖像數據庫的形式,提供 3D 環境的先驗知識。可以執行帶有關聯相機的地面 LiDAR(光檢測和測距)調查 (TLS), 來獲取用於生成圖像數據庫(RGB-D 圖像)的環境的 3D 模型。一旦完成參考圖像的檢索,就可以從圖像中提取所選特徵的 3D 資訊,根據共線性方程估計查詢圖像的外部參數(位置和姿態)(圖6)。
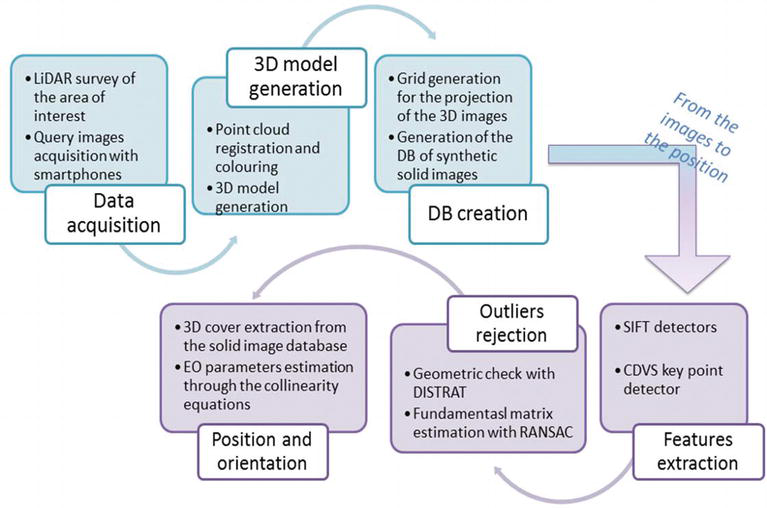
圖 6。
IRBL 程序。
先驗 資訊對於這些技術是必要的,但如今,由於一些地理資訊技術(例如攝影測量、雷射雷達和行動測繪系統)的整合,可以獲得始終可用於進一步升級,並可用於附帶任務的準確 3D 模型.
表 4 總結了在與地面實況和估計值,差異方面的準確度結果,在查詢圖像與從數據庫中提取的參考圖像之間,具有良好相似度的情況下,用於室內試驗。
| 標準 | 標準說明 | 價值 |
|---|---|---|
| 水平精度 | 用於檢測超市貨架的二維位置 | 1米 |
| 垂直精度 | 選擇正確的樓層和可視化 | 樓層檢測 |
| 更新率 | 最低導航 | 1赫茲 |
| 潛伏 | 延遲用戶可用的位置 | 沒有任何 |
| TTFF | Time-To-First-Fix,開啟設備後的延遲 | 不延誤 |
| 隱私 | 維護用戶隱私 | 根據用戶設置的策略 |
表3。
根據 Wirola 等人的說法,對大規模標記本地化的要求摘要。
| 參數。 | ΔX [米] | ΔY [米] | ΔZ [米] | Δω [弧度] | Δφ [弧度] | Δk [弧度] |
|---|---|---|---|---|---|---|
| |最大| | 0.164 | 0.149 | 0.063 | 0.4646 | 0.5288 | 0.2396 |
| 意思 | 0.018 | 0.010 | 0.015 | 0.0975 | 0.0544 | 0.0573 |
| 開發。英石。 | 0.084 | 0.086 | 0.020 | 0.1850 | 0.1689 | 0.1022 |
表 4。
室內位置試驗的精度結果 (ΔX, Δ是, ΔZ) 和姿態 (Δω, Δφ, Δ克)。
重要的是要說明整個過程,可以在商用智慧手機上即時執行,並且可以在幾秒鐘內提供設備位置。這對於單點定位任務來說是正確的,而當需要對室內導航方法進行轉換時,需要考慮三個基本問題:能耗、圖像處理的延遲和網路數據消耗。以給定的幀速率為導航應用獲取圖像,是一個需要大量能源浪費的過程,隨之而來的是電池優化問題。此外,由於每個查詢圖像都必須發送到伺服器,進行圖像檢索過程,因此需要一定量的網路流量。
最後,為了克服幀速率和延遲補償的降低,使用 MEMS(微機電系統)技術建構的慣性(INS)平台,可以整合到 IRB 定位中。將 IRB 位置和姿態測量,與 INS 測量、加速度和角速度測量相結合,以提供即時的相對位置和相對姿態資訊,同時估計 INS 內部變量(起點處的速度、加速度計偏差和陀螺儀漂移),使用絕對 IRB 定位輸入(位置和姿態)。
當 MEMS 技術與 IRB 定位一起使用時,重要的是分析可獲得的精度和準確度。該程序在我們的校園中,使用安裝在特殊支架上的兩個不同的智慧手機 (a), 在預定義的路徑上進行了測試,如圖 3 所示。
該程序首先分析慣性感測器的原始數據(加速度、角速度和磁場強度),這些數據直接從智慧手機記錄。有必要過濾這些數據以估計和去除噪聲。之後,考慮到卡爾曼濾波器方法,可以實時使用 INS 原始數據進行定位,以減少可用於地理定位的幀數。這意味著可以將兩個圖像之間的時間間隔,從 2 秒延長至 5 秒,具體取決於所需的精度。
在表 5 中,我們看到了在精度方面的定位結果,考慮到了 IBN 方法。考慮到圖像之間的間隔為 1 秒,在 67% 的可靠性下,平均平面誤差為 21.3 厘米,而在 95% 的可靠性下,該誤差為 37 厘米。
| 1 秒 | 2 秒 | 5 秒 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 意思 | 百分位 | 意思 | 百分位 | 意思 | 百分位 | ||||
| 67% | 95% | 67% | 95% | 67% | 95% | ||||
| 乙 | 0.130 | 0.148 | 0.353 | 0.387 | 0.485 | 0.960 | 1.673 | 2.221 | 4.158 |
| N | 0.130 | 0.141 | 0.412 | 0.380 | 0.409 | 1.162 | 1.574 | 1.677 | 3.952 |
表 5。
使用來自圖像的漂移估計獲得的結果。
當分析圖像之間間隔 2 秒獲得的定位時,平均平面誤差在 67% 時增加到 61 cm,在 95% 時增加到 1.49 m。
IBN 允許將最終殘差減少到 50%,並將中斷時間增加到 90 秒,甚至可以提高估計角度的品質。目前,IBN 需要高性能伺服器才能獲得解決方案,和定義良好的圖像數據庫(DB)。
3.2.2. Wi-Fi 等。
在過去十年中,無線位置估計一直是一個活躍的研究領域,成為在 GNSS 拒絕環境中,進行室內定位的最廣泛方法。WLAN(無線局域網,IEEE 802.11 標準),也稱為 Wi-Fi(Wi-Fi 是 Wi-Fi 聯盟的商標),是使用高頻無線電信號(2.4 GHz in ISM 頻段)在有限區域內發送和接收數據。由於網路節點之間的連接保持連續性,即使一台設備在有限區域(50-100 m)內移動,通信也能保持。這意味著由於這些原因,WLAN 技術可用於估計該網路中行動設備的位置。提供令人滿意的 LBS 所需的定位精度在 1 m 量級,並且需要大量的研發工作。除了眾多商業應用之外,該研究領域的擴展預計將持續數年,因為它是提供適當連接和高速鏈接的低成本解決方案。事實上,如今,WLAN 基礎設施在許多室內環境中廣泛使用,並且已經標準化用於商業智慧手機通信。
通常,室內環境往往是複雜的,以目標物體的非視距 (NLOS) 為特徵;在這些情況下,WLAN 定位技術可能會非常有用,因為它們不需要視線。不幸的是,與 IRBL 程序相比,WLAN 定位受較大估計誤差的影響,與網絡中節點的數量和位置成正比。其他具有挑戰性的問題是功耗和信號衰減。
WLAN 定位的優點和缺點,在所使用的定位技術的功能上都是正確的。最流行的 WLAN 定位方法是基於接收信號直接指示符 (RSSI),因為它很容易從 Wi-Fi 網路中的任何連接設備中提取。RSSI 方法基於接收信號功率,以及信號衰減與節點距離之間的關係。知道發射信號的強度,接收信號的強度,可以計算其衰減,從而計算發射器和接收器之間的距離。使用這些技術,可以結合不同的定位策略,如傳播建模、指紋辨識、起源單元和多點定位 。
為了獲得最精確的定位,有必要結合指紋辨識技術,該技術包括一個先驗分析,以映射室內環境每個地方固定路由器的觀測信號強度。有了這些數據,就可以生成一個數據庫(即無線電地圖)。這種方法的局限性在於先驗資訊,這意味著工作量增加,和分佈廣泛的路由器網路。傳播模型與指紋模型不同,因為它試圖透過分析而不是經驗,來確定 RSSI 映射。當然,主要問題與環境影響(移動物體、信號衰減、多徑)的正確描述和建模有關。
在 Wi-Fi 定位系統中,定位設備的另一種方法是原點 (CoO) 方法,該方法使接收器位置與生成最高 RSSI 值的接入點 (AP) 的坐標重合。由於室內環境中 AP 的空間分佈,這種類型的技術能夠以大約 10-20 m 的誤差到達位置。
最後,由於行動設備中此類測量的計算複雜性,多點測量方法(如到達時間、到達時間差、到達角度等)在 WLAN 定位中不太常見。
He 等人發表了一篇關於室內定位 WLAN 系統的文獻綜述。2016 年之前有很多關於室內 Wi-Fi 定位的研究,追求不同的目標,使用不同的方法和技術,也在研究小組感興趣的領域發揮作用。特別是,除了在帶有感測器整合的自製行動設備上,進行定位和導航方面的眾多有趣工作外,還有一些研究利用 COTS(商業上架)智慧手機中的嵌入式感測器。一些有趣的工作利用了基於慣性感測器的定位,與智慧手機的 Wi-Fi 功能的整合。例如,在有作者提出了一個感測器融合框架,用於結合 Wi-Fi、行人航位推算 (PDR) 和地標。整個系統在智慧手機上運行,Android 應用 app 是為即時室內定位和導航而開發的。
確定的精度為 1 m。有文獻中描述了一種有趣的 Wi-Fi 導航多模式方法,其中 PDR 僅使用低成本感測器執行,Wi-Fi 智慧手機在一定數量的參與者,進行的合作定位操作中發布。隨著參與者數量的增加(50 台設備為 5 m),誤差的大小會變小。有些研究人員將 GPS 整合用於基於雲的 LBS,而其他研究人員則在 Wi-Fi 和 CIS 之間引入感測器融合,以實現準確的室內定位,或用於增強實境導航 。
描述了當今實施的室內定位系統及其應用,和可獲得的定位精度的全面而完整的視圖。
4. 結論
在本章中,作者試圖描述考慮智慧手機技術的室外和室內場景中的定位性能和方法。特別是,在這兩種情況下,已經分析了智慧手機技術的最新水平,即這些儀器用於定位和導航目的所能達到的精度和準確度。
即使在室外場景下,僅考慮 GNSS 感測器,在開闊天空條件下,可獲得的精度小於 5 m,但在室內環境中,如果某些感測器,如 INS、攝影機或 Wi- Fi 技術,正在考慮中。將 IRB 技術與 MEMS 技術相融合,獲得了有趣的結果:考慮到圖像之間的間隔為 2 秒,平均平面誤差在 67% 時約為 61 cm,在可靠性為 95% 時約為 1.49 m。一種可能有趣的室內定位替代方案,可以透過距離相機和 INS 儀器的融合來表示。
這不是一個詳盡的概述,還因為技術的發展速度比產生它們的思想要快:因此,這將是有關這些用於定位和測繪應用的儀器的未來工作的起點。
 |
| IDVIEW 即將登場 100% MIT |
0 comments:
張貼留言