
IMAGING & MACHINE VISION EUROPE
格雷格·布萊克曼探索了改變我們道路的願景和人工智慧技術,因為運輸部門聚集在阿姆斯特丹交通交易會上
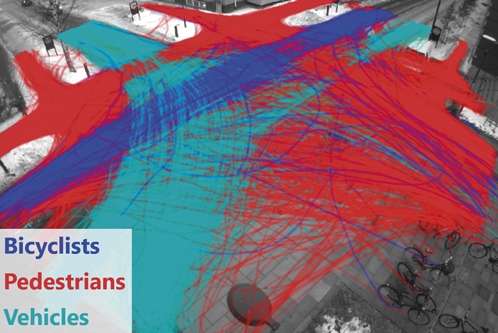
幹默奧市道路使用者移動的視覺化。除了在多條計數線上計算跟蹤外,Viscando還分析了交通衝突的趨勢。 來源:Viscando
阿姆斯特丹正在建立其智慧證書。 該市政府正在與 Zuidas 商業區的企業合作,建立一個行動即服務應用 app,該應用 app 於 2020 年晚些時候釋出。這個想法是鼓勵通勤者拋開汽車,使用替代交通方式,該應用 app 使其更容易。最終目標是,到 2025 年,整個阿姆斯特丹都將擁有可靠、負擔得起和可訪問的共享交通方式。
行動即服務(MaaS,Mobility-as-a-service)是 2020 年 4 月 21 日至 24 日阿姆斯特丹 Intertraffic 展會的大趨勢之一。該模式是從依賴自己的車輛的人轉變為提供運輸服務的人。它依賴於資料,Intertraffic 的另一個趨勢話題,即時資料是視覺系統可以提供的東西。作為 Intertraffic 會議計劃的一部分,在大數據主題下,來自 Swisstraffic、Vincando 和 Flir 的代表將介紹如何用視覺和人工智慧控制流量。
Viscando 的執行長 Amritpal Singh,在接受 IMAGING & MACHINE VISION EUROPE 採訪時表示,它希望利用電腦視覺和人工智慧的潛力,為城市帶來客觀和定量的資訊。Singh 於 4 月 22 日下午 4 點在 Intertraffic 的劇院 2 號演講。
Viscando 的立體視覺技術用於監控流量,但也用於控制流量。該公司的願景系統可以透過道路交叉口或任何開放區域(如共享空間或物流公司的貨艙)追蹤交通。
該系統能夠同時檢測和追蹤各種機動車輛,以及腳踏車和行人。它可以在 20Hz 下做到這一點。
Singh 解釋說:「我們得到了大量關於道路使用者,如何透過十字路口的詳細資料。」「我們可以分析道路使用者的軌跡,看看人們的行為,例如交通號誌燈,或者分析衝突風險,測量人們在車輛之間留下的差距。」
攝影機生成了許多關於道路使用者之間行為和互動,及其對交通安全的影響的細節。根據 Singh 的說法,長期目標是利用機器學習,來預測道路交叉口的交通需求,並將交叉口相互連線起來。Viscando 在瑞典有兩個正在進行的試點專案,正在調查這個問題,並於本月(2月)在挪威開始了試點。Singh說:「有很多可能性可以全面瞭解交叉路口的工作原理,並提供資料來最佳化它。」
斯德哥爾摩的試點專案被稱為多感測器專案,正在使用該系統來控制交通。 這是與該市一起進行的現場審判。該專案希望顯現,可以取代感應環路來替代視覺技術,以測量進出路口的車輛數量,包括行人和騎腳踏車的人。斯德哥爾摩審判於 8 月開始,為期一年。
Viscando 還獲得了政府資助,用於烏普薩拉的另一個專案,建立了一個完整的解決方案,以提供與斯德哥爾摩類似的試點,但用於更大的十字路口。
通常,每個十字路口需要一台到四台攝影機,這取決於路口的大小。Viscando 能夠提供多台攝影機追蹤,其中覆蓋交叉口的任何數量的攝影機都像一個系統一樣。安裝可以使用一個具有大視野的感測器,但通常安裝了三個具有 90 度視野的感測器,這在覆蓋範圍和避免樹木或建築物的遮擋方面提供了更大的靈活性。
OTUS3D 立體視覺攝影機,使用機器學習演算法即時工作。Viscando 的技術符合 GDPR 法規,因為攝影機不記錄或傳輸影像 —— 所有軌跡資料都在攝影機上即時提取。資料目前處於離線分析。
Singh 說:「特別是瑞典和德國,對 GDPR 規則有非常嚴格的解釋,我們的系統非常適合這些規則。」
該系統的即時能力意味著,它能夠控制透過十字路口的交通。Singh 補充說:「在短期內,我們可以用單個 3D 視覺系統替換五到十個感應迴路,如果安裝了兩個或三個系統,我們可以用非侵入性、低維護技術完全控制十字路口。」「它還為城市提供了更多關於十字路口如何運作、排隊時間和等待時間的資料,以及能夠將行人和騎腳踏車的人納入相同的最佳化計劃。」
與其根據汽車數量最佳化交通流量,不如根據透過十字路口的行人或騎腳踏車的人的數量進行最佳化,這可能會在一天中有所不同。
攝影機可以為每個物體提供現實世界的座標,因為它是一個 3D 系統。Singh 說,這使得系統之間的校準更容易,或多或少是自動的。這也簡化了將交通資料納入城市的地理資訊系統。
Singh 解釋說,使用 3D 視覺的好處是,無論物體在視野中的位置,它都能提供物體的大小。這也意味著在使用 2D 攝影機時,速度會自動記錄,無需校準。3D 系統還可以追蹤直接向攝影機移動的物體,這在 2D 攝影機中很難做到。
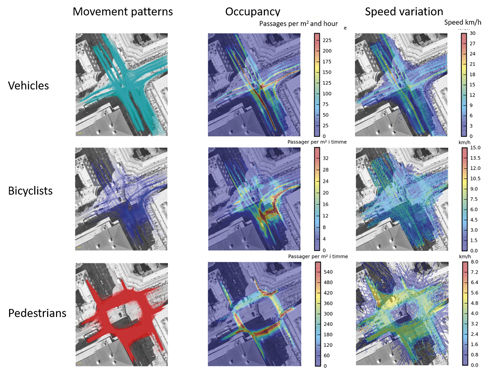
斯德哥爾摩最大的十字路口之一的道路使用者行動視覺化。幾個系統並行工作,道路使用者透過多個視野進行追蹤。3% 的機動車開紅燈;20% 的腳踏車手也這樣做。 來源:Viscando
此外,例如,當演算法對物體進行分類時,它可以使用 3D 視覺來考慮物體的幾何形狀,而不依賴穩定的照明 —— 3D 攝影機對照明的變化很強大。
Singh 解釋說:「即時處理很重要,因此我們結合了淺層學習和深度學習,以便在系統準確性和即時性質方面獲得效能,而無需非常昂貴的硬體。」該系統與 GPU 一起在 Linux 電腦上執行。
攝影機的原始資料輸出是 20Hz 的追蹤資料,其中包含有關道路使用者類型、位置、時間,和其他元資料的資訊。
在 Intertraffic,Viscando 將展示其交通監控功能,以及如何使用攝影機進行基於視覺資料的即時控制。
Swisstraffic 還將在 Intertraffic 上推出內建人工智慧的新視覺系統。與 Viscando 的攝影機類似,瑞士人工智慧感測器能夠即時評估影像,並在攝影機上提供車輛、腳踏車和行人追蹤。它也符合 GDPR,因為沒有儲存影像,也沒有影相串流。人工智慧軟體的準確性為 95%。
在瑞士伯爾尼的一個試驗專案中,與 Swisstraffic 的合作夥伴 Elektron 一起在道路上安裝了人工智慧攝影機,該公司製造了智慧照明系統。除其他外,該攝影機用於根據交通量控制路燈 —— 當道路上沒有交通時,路燈可以關閉,以節省能源並減少光汙染。
Swisstraffic 的首席通訊官 Maria Riniker 評論說:「機器學習為我們提供了交通管理的巨大機會。」「新增這些感測器可以使道路交叉口更安全。例如,該裝置可以檢測道路使用者之間的瀕臨錯;這些類型的統計資料通常不會被記錄下來。
Swisstraffic 2019 年在巴塞羅那舉行的智慧城市博覽會上,首次展示了人工智慧系統,於 2020 年 4 月在 Intertraffic Amsterdam 上展示了人工智慧系統。Swisstraffic 的 Alain Bützberger 將於 4 月 22 日下午 2 點在 Intertraffic 高峰會劇院展示該公司的技術。
Vitronic 還正在將人工智慧納入其自動收費系統,該系統將在 Intertraffic Amsterdam 上展示。Vitronic 收費產品經理 René Pohl 表示,透過使用卷積神經網路和經典影像處理,Vitronic 工程師能夠提高讀取車牌的辨識率,並對車輛進行分類。他說,對客戶來說,每輛車都被檢測和辨識尤為重要;否則他們將損失收入。
Vitronic 還與德國達姆施塔特應用科學大學合作,研究人員正在使用來自現有和新的交通執法,和管理基礎設施的資料,與環境資料相結合,作為靜態交通模型的經驗資料庫,或作為動態交通模型的輸入資料。
自動駕駛
Viscando 生成的追蹤資料對汽車行業也很有價值,無論是對交通安全和自動駕駛汽車的發展。Singh 說:「我們很幸運地位於哥德堡,VOLVO 富豪汽車和 VOLVO 卡車的總部所在地,還有 VOLVO 的供應商 Veoneer、Zenuity 和 Autoliv。」 這些供應商都開發了 ADAS 和自動駕駛技術。
Viscando 與 、Veoneer 和 Zenuity 以及愛立信,有著良好的合作關係。Singh 解釋說:「這些公司使用我們的資料,來瞭解道路使用者的行為和互動,這樣他們就可以考慮如何開發自動駕駛汽車,以及他們最終會遇到什麼樣的情況。」
他接著說,自動駕駛汽車是一個安全關鍵系統,由於其執行基於機器學習,因此將涉及某種迴歸。他說:「所有機器學習方法都傾向於專注於主要功能,並消除任何異常值。」「但對於安全關鍵型系統,你無法真正消除異常值,因為在大多數情況下,這些異常值非常重要。」
Viscando 收集資料,用於辨識道路使用者,在不同情況下可能遇到的異常值類型。然後,汽車公司在模擬和建構其自動駕駛演算法時,可以考慮到這一點。根據 Singh 的說法,這些資料意味著駕駛模擬,可以基於 95% 的車輛移動的真實資料,只有最後 5% 的外推。
Viscando 與 VOLVO 汽車、Veoneer、Autoliv 和 Chalmers 理工大學有一個為期三年的專案,Viscando 攝影機將在那裡,為該專案的某些部分收集資料。
Singh 說,Viscando 2020 年將擴大很多。到 2020 年年中,它將為小型交叉路口提供即時交通控制系統。該公司已經可以提供一個控制循環路徑的系統,Viscando 還正在努力使目前執行的一些分析功能,作為線上即時功能提供。

沒有留言:
張貼留言