借助 LeapMotion 控制 UR10 機器人和 3 指機器人夾爪


正在增加機器人應用,主要與人類一起工作的機器人有關。機器人正在幫助重複執行任務,以實現更高的精度或良好的可性。但為了尋找阻止人類工程學,研究人的生物方法包括負擔的。
這是 ParisTech 大學正在開發的一個技術項目,他們正在開發一個單獨使用或成功的方法,讓我透過手工與機器人直接使用,而不是機器人直接使用。接觸,即飛躍運動技術,用戶無需接觸即可使用機器人和抓手。
材料
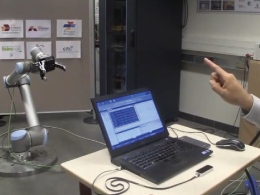
該項目使用與 Robotiq 3-Finger Adaptive Gripper 用戶的通用機器人(UR10)。和機器人之間的接口是 Leap Motion 該設備基本上是一個辨識人類手部動作的感測器。這可以與 Microsoft Kinect 進行比較。他們正在使用 Leap Motion 傳輸的訓號,來控制機器人單元。最酷的是,機器人僅由視覺感測器控制,Gripper 也是如此!用戶使用他/允許的手部動作來引導整個單元格。
實用程序
是由於對員工的重載,而可以使用此系統的設置項目,而對用戶施加的壓力。他們現在還想用什麼樣的工具來展示。觸覺感測器由於更多的回饋是真實的,儘管現在使用智慧手機,可以更精確地控制機器人中的應用。
該項目在工業應用方面的情況下,如果我們將這個應用推得更遠一點,我們也很容易看到醫療援助的應用。合作,以便能夠抓住東西對於工業自動化以外的領域而言,這可能是改變遊戲規則的技術。
藝術與工藝,科技大學
法國科技大學包括 8 個研究生級別的校園,或機械教學和研究中心,就像他們所說的那樣,以及分佈在法國各地學校的三個工業中心。他們的使命是培訓、和和研究領域的工程師。在里爾校區,他們是他們的第二個機器人技術平台項目之一。非接觸式合作開發實驗室,包含在他們的實驗室項目中進行生產,被認為是學生、研究人員和機器人市場之間真正的。
沒有留言:
張貼留言