Global Shutter vs. Rolling Shutter - Choosing the Right Image Sensor for the Right Application
全局快門與滾動快門 - 為正確的應用選擇正確的圖像感測器


Andor 的 Neo 和 Zyla 攝影機採用 CIS 2051 感測器,以及我們最新的大面積 Balor sCMOS 攝影機(其傳感器是 Andor 獨有的)採用 5T(5 晶體管)像素架構設計,提供滾動和全局快門模式選擇(也稱為滾動和全局曝光模式)。這提供了卓越的應用和同步靈活性,並能夠通過全局快門密切模擬隔行 CCD 熟悉的「快照」曝光機制。
滾動和全局快門模式描述了兩種不同的序列,透過它們可以從 sCMOS 感測器讀取圖像。在滾動快門模式下,當讀出的「波」掃過感測器時,陣列的不同線在不同時間曝光,而在全局快門模式下,感測器中的每個像素同時開始和結束曝光,類似於曝光機制隔行 CCD。然而,絕對最低的噪音和最快的非同步幀速率,是通過滾動快門模式實現的。
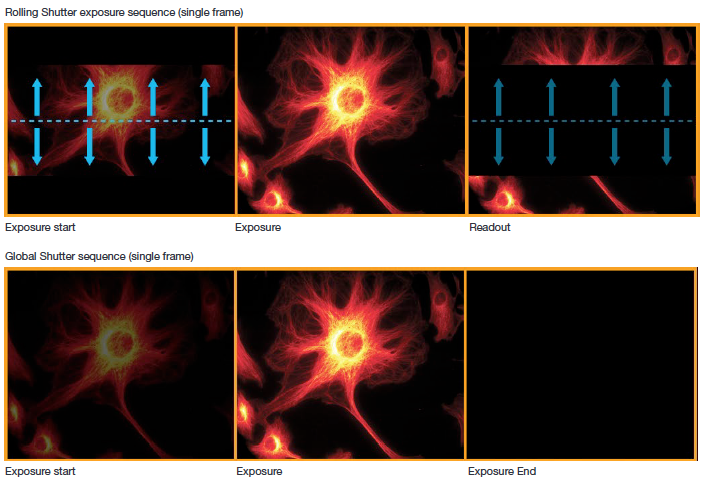
圖 1 - 顯示滾動和全局快門模式下的事件序列的簡化圖。請注意,雖然表示單個圖像採集,但每種模式也與“重疊”讀出兼容,因此下一次曝光與圖像讀出同時開始。
傳統上,大多數 CMOS 感測器提供一種模式或另一種模式,但 Andor 的Balor、Neo 和 Zyla sCMOS 攝影機的感測器提供滾動,和全局快門模式的選擇。使用這些攝影機解決方案,用戶可以從同一感測器中選擇(通過軟體選擇)任一讀出模式,從而可以根據特定的應用要求,選擇最合適的模式。
滾動快門模式
下面將基於 Neo 和 Zyla sCMOS 攝影機解釋滾動快門模式。滾動快門模式基本上意味著當讀出「波」掃過感測器的每一半時,陣列的相鄰行在稍微不同的時間曝光。也就是說,每一行都將開始和結束其曝光時間與其相鄰的稍微偏移。在 560 MHz(Zyla 5.5 和 Neo 5.5)的最大讀出速率下,相鄰行曝光之間的偏移為 10 μs。捲簾式讀取機制如圖1所示。從讀取的角度來看,傳感器被水平分成兩半,每列從中心向外同時並行讀取,逐行讀取。
在曝光開始時,波掃過傳感器的每一半,依次將每一行從「保持清潔狀態」(所有電荷從防暈光結構中的像素中排出)切換到「曝光狀態」模式下運行,在每一行被讀出後,它立即進入下一次曝光。這確保了 100% 的佔空比,這意味著在曝光之間不會浪費時間,也許更重要的是,不會浪費光子。在給定讀出速度的最大幀速率(例如,Zyla 5.5 和 Neo 5.5 在 560 MHz 下為 100 fps),傳感器以重疊模式連續讀出,即一旦讀出前沿到達傳感器的頂部和底部,他們立即返回中心讀取下一次曝光。
滾動快門模式 - 缺點
捲簾快門模式的一個潛在缺點是空間失真,這是由上述曝光機製造成的。在較大物體以圖像讀數無法匹配的速度移動的情況下,失真會更加明顯。然而,當相對較小的對像,以幀速率在時間上過採樣的速率移動時,失真的可能性較小。
另一個缺點是曝光圖像的不同區域,不會與其他區域在時間上精確相關,這對於某些用途可能是必不可少的。最後一個非常重要的因素是同步(例如光源激活或外圍設備移動)到滾動快門讀數可能很複雜,並且相對於全局快門可實現的那些,還可能導致更慢的循環時間和幀速率。
全局快門 - 「行間 CCD 模式」
全局快門模式,也可以被認為是「快照」曝光模式,意味著陣列的所有像素同時曝光,從而實現快速移動或快速變化事件的「定格」捕捉,在這方面,全局快門可以認為其行為類似於行間 CCD 傳感器。在曝光開始之前,陣列中的所有像素都將保持在「保持清潔狀態」,在此期間,電荷會被排放到每個像素的防光暈結構中。在曝光開始時,每個像素同時開始收集電荷,並允許在曝光時間內這樣做。在曝光結束時,每個像素同時將電荷轉移到其讀出節點。
全局快門可以配置為在連續「重疊」模式下運行(類似於行間 CCD),由此可以在從每個像素的讀出節點讀出前一次曝光的同時進行曝光。在此模式下,感測器具有 100% 的佔空比,再次實現最佳時間分辨率和光子收集效率。在整個週期中,沒有捲簾快門中的「瞬態」讀數週期。
重要的是,全局快門模式非常易於同步,並且通常比在相同曝光時間下,與滾動快門同步的努力產生更快的幀速率。當感測器區域的不同區域之間,需要精確的時間相關性時,也可以將全局快門視為必不可少的。
然而,全局快門模式的機制要求,除了從每個像素實際讀出電荷外,還需要在「幕後」執行參考讀出。需要這種額外的數位化讀數來消除全局快門圖像中的複位噪聲。由於這種額外的參考讀數,全局快門模式需要權衡將最大非同步幀速率減半,否則在滾動快門模式下可以實現。

滾動快門還是全局快門模式?
無論是滾動快門或全局快門模式是正確的,你將在很大程度上取決於實驗。全局快門具有完全類似於行間 CCD 的「非瞬態」曝光機制,並且對於許多將在零空間失真的動態採集系列期間,提供「定格」捕獲移動物體或瞬態事件的保證,以及提供更簡單、更快的同步性能。對於特定應用,例如需要圖像的不同區域,保持時間相關性,或需要準確同步相對較短的事件,全局快門將被視為必需品。
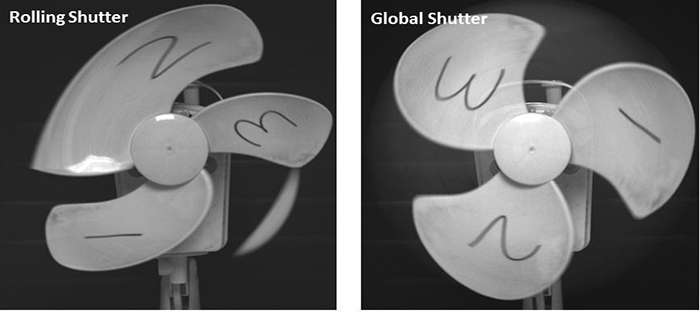
圖 2 - 移動風扇的圖像,使用具有滾動和全局快門曝光模式的 Neo sCMOS 攝影機獲取,曝光時間相同。與「捲簾快門效應」相關的空間失真在左圖中很明顯。全局快門是一種「快照」採集模式,可避免空間失真。
圖 2 顯示了移動風扇的圖像,使用Neo sCMOS 相機的滾動和全局快門曝光模式拍攝,曝光時間相同。在使用捲簾快門拍攝的圖像中,風扇葉片的顯著空間失真(超越運動模糊)很明顯。這樣做的原因是,相對於捲簾快門的「瞬態」曝光激活/讀出前沿橫切葉片寬度所花費的時間,葉片移動速度較快。這種空間失真通常被稱為「滾動快門效應」。
然而,滾動快門模式,具有增強的非同步 最大幀率的可能性和較低的讀取噪聲,仍然可能適合許多科學應用,例如,人們只需要跟踪作為時間函數的 2D 中相對較小的對象。只要幀速率使得攝影機在圖像區域內,對物體動態進行時間過採樣,在滾動快門模式下,觀察到的空間失真可以忽略不計。這種過採樣是良好的成像實踐,因為在單次曝光期間通常不希望物體移動很遠的距離。但是,必須始終牢記的是,即使失真不明顯,圖像底部頂部的物體,將被捕獲到與圖像中心的物體相距最多 10 毫秒的距離:如果這是一個為您的實驗考慮因素,則不應使用捲簾快門。
使用全局快門在 2 次連續曝光之間縮短電荷傳輸時間
Neo sCMOS 的全局快門模式可用於實現電子門控,類似於行間 CCD 的可能效果。在曝光之前,陣列中的所有像素都將保持在「保持清潔狀態」,在此期間,電荷會被排放到每個像素的防暈光結構中,從而充當「電子快門」。曝光「開啟」是電子的,速度極快(亞微秒)。在曝光結束時,每個像素同時將電荷轉移到其讀出節點,再次充當電子快門關閉機制。此步驟的傳輸時間規格僅為 2 µs,經光學測量小於 1 µs。
全局快門模式下2 個連續圖像之間的短傳輸時間使Neo sCMOS 可用於快速「雙重曝光」應用,例如粒子成像測速 (PIV)。
與滾動和全局快門同步
靈活性來提供兩個 卷簾和真正的全局快門,可以被認為是非常有利的。捲簾快門提供絕對最低的讀取噪聲,最適合用於非常快速的數據流(> 50 fps 全幀),無需與光源或外圍設備同步。然而,它存在空間失真的風險,尤其是在對相對較大、快速移動的物體進行成像時。使用真正的全局快門時沒有空間失真的風險。為了避免捲簾快門中的空間失真,必須使用模擬全局曝光同步方法,這需要脈衝光源並且還顯著降低光子收集的佔空比(即減少每個週期收集的光子)。相比之下,全局快門可以保持 100% 的佔空比。
當同步到快速切換的外圍設備時,真正的 全局快門模式相對簡單,可以帶來更快的幀速率。雖然全局快門模式下的讀取噪聲 (~2.5 e - ) 大約是捲簾快門 (~ 1.2 e - ) 的兩倍,但這通常可以抵消更高的佔空比(因此每個週期的光子收集增加),和更高的同步幀在真正的 全局快門模式下可能的速率 。
「第一代」與「第二代」sCMOS?
令人感興趣的是,sCMOS 領域的另一位傑出參與者選擇將術語「第二代」應用於Zyla 和 Neo sCMOS 攝影機中使用的低噪聲像素架構的 4T(4 晶體管)變體。雖然可以認為 4T 設計,有利於提供略微改進的量子效率響應,但這樣做是以犧牲全局快門能力為代價的,從而限制了應用靈活性和同步性能。
在作者看來,當 4T(捲簾快門)和 5T(全局快門)CMOS 概念,已經存在一段時間並且非常重要時,將激進的「第二代」行銷標籤,應用於這種感測器變體是相當大的。有據可查。
事實上,CIS2051 sCMOS 感測器的架構,如果有的話,可以被認為更具創新性,因為它經過獨特設計,可提供全局快門,同時保持滾動快門功能。在設計階段,Andor 和合作夥伴可以選擇 4T 捲簾門或我們選擇的設計 —— 這個決定是基於可靠的應用推理做出的。

沒有留言:
張貼留言