3S Market deliver Smart and Valuable information for Business 3S Market 傳遞 智慧應用與價值的商業資訊 部分禁令解除!安卓使用權將恢復 ? 華為:靜待美商務部...
3S Market deliver Smart and Valuable information for Business 3S Market 傳遞 智慧應用與價值的商業資訊 部分禁令解除!安卓使用權將恢復 ? 華為:靜待美商務部...

Robot navigation in dynamic environments MITS 旭捷網路時間管理解決方案 https://tw.mitscomponent.com/products_237_59.htm 來源: SLA...
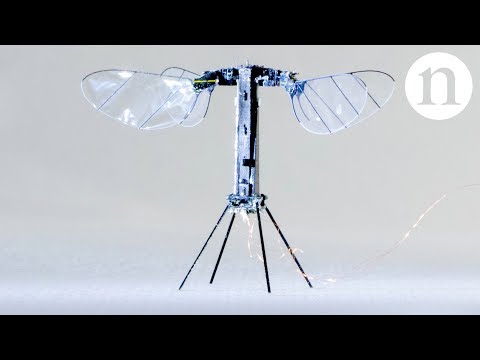
Insect-sized robot takes flight: RoboBee X-Wing 全世界最小的 PoE 模組 https://tw.mitscomponent.com/news_detail_211.htm infant 作...