3S Market deliver Smart and Valuable information for Business 3S Market 傳遞 智慧應用與價值的商業資訊 China trade tensions fl...

3S Market deliver Smart and Valuable information for Business 3S Market 傳遞 智慧應用與價值的商業資訊 China trade tensions fl...

Seagate HDD Manufacturing Process, 康橋科技 —— 白光攝影機專業廠商! eiphone 作者: 张 栋 內容綜述: ‧ 希捷打造了一個切實可行的、實用的人工智慧(AI)平台以提升生產線效率和產品...
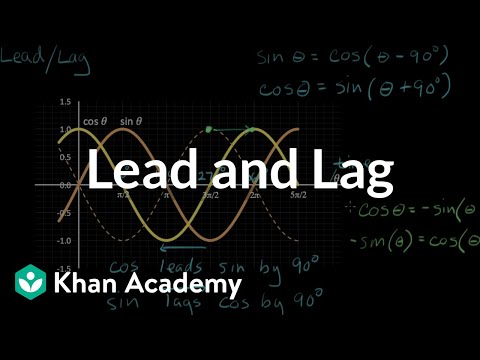
Lead Lag AKD 寰楚1080P 零售商店 監控專用機 來源: 智能风向标 電壓電流的超前與滯後這個概念,是相對於電流和電壓之間的關係而說的。 比如是容性負載(電容器),那麼他會導致最終電流超前90度,如果是...

AR NAVIGATION 來源: 四维智联 導航已成為出行必不可少的工具,可以幫助人們順利達到陌生地點。即使是熟悉的路線,也會利用導航查詢當前路況,避免塞車。 但在日常使用傳統導航時,經常會遇到複雜的路口,儘管手機導航語音播報已很清楚,但由於...

Production 4.0 – Secure Human- and Robot Interaction 康橋科技 —— 白光攝影機專業廠商! 來 源: OFweek机器人网 製造業的生產力已經歷了三次深刻的變革,第一次是以水和蒸汽動力為核...

Zhenan Bao, Stanford University, Skin-Inspired Electronic Materials 科寶電子官網 www.cop-security.com 來 源: 微迷网 據麥姆斯咨詢介紹,開發與人手媲...