OpenCV Python Tutorial - Find Lanes for Self-Driving Cars (Computer Vision Basics Tutorial)
 |
| 康橋科技 —— 白光攝影機專業廠商! |
電腦視覺是人工智慧最熱門的應用領域之一。人工智慧技術推動了汽車自動駕駛、機器人,以及各種照片處理類軟體的巨大發展。目標檢測技術也在穩步推進。生成對抗網路(GANs)同樣也是人們最近比較關注的一個問題。
這些都在向我們展示,未來電腦視覺領域的發展前景,是多麼的不可限量。
讓我們一起登上人工智慧發展的高速列車。從本文開始,我們將有一系列關於圖像處理和目標檢測基礎知識的教程。本篇是OpenCV入門教程第一部分,完整的系列教程如下:
1. 理解顏色模型與在圖像上繪製圖形(圖像處理基本操作)。
2. 基本的圖像處理與過濾。
3. 從特徵檢測到人臉檢測(TBU)
本系列的第一部分將從 Opencv 的安裝,結合代碼實戰講解顏色模型與圖形繪製講起。本教程的完整代碼已經放在Github上,方便大家使用。
一、OpenCV簡介
圖像處理是指,對圖像執行一些操作,以達到預期效果的過程。可以類比數據分析工作,在數據分析時,我們需要做一些數據預處和特徵工程。圖像處理也是一樣的。我們透過圖像處理,來處理圖片,從而可以從中提取處,一些更加有用的特徵。我們可以透過圖像處理,減少圖像噪聲,調整圖像亮度、顏色或者對比度等等。想要進一步系統瞭解圖像處理基礎知識,參看(https://www.youtube.com/watch?v=QMLbTEQJCaI)。
OpenCV是Open Source Computer Vision的縮寫,由英特爾公司於1999年推出。它最初是用C/ C++編寫的,所以你可能會看到更多用C語言,而不是Python編寫的教程。但現在它在Python中,也被廣泛用於電腦視覺。首先,讓我們為使用OpenCV配置環境。安裝過程如下,詳細安裝描述參看(https://pypi.org/project/opencv-python/)。
安裝完成後,可以透過下方兩條命令,測試其是否正常工作。如果沒有任何報錯,那麼就可以開始使用了!
我們使用用OpenCV做的第一步就是導入一個圖像,如下方所示。

上圖是在義大利最美麗的島嶼之一布拉諾所拍攝的。如果你去過這個地方,你可能會注意到這幅圖裡有些不同。這確實和我們通常看到的,布拉諾的照片有點不同。這是因為OpenCV中顏色模式的默認設置順序是BGR,不同與Matplotlib。因此,要在RGB模式下查看圖像,我們需要將它從BGR轉換為RGB,如下所示。
這張圖就是真正的布拉諾了,多麼美麗!
二、不只是RGB
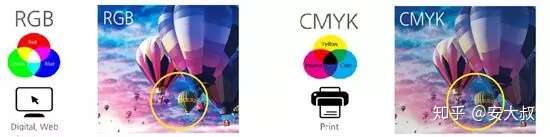
我們再來談談顏色模型。顏色模型是一個使用原色,建構全系列顏色的系統。這裡先介紹這兩種不同的顏色模型:「加色模型」和」減色模型」。加色模型使用光代表電腦螢幕上的顏色,而減色模型使用墨水,在紙上列印這些數字圖像。
前者的原色由紅色、綠色和藍色(RGB)組成,後者有藍色、品紅、黃色和黑色(CMYK)四種原色組成。我們在圖像上看到的所有其他顏色,都是由這些原色組合或混合而成的。所以當分別用RGB、CMYK表示一張圖像時,圖像可以有著略微不同地表達。如下圖所示。
日常生活中見到最多的就是這兩種顏色模型。然而,在彩色模型的世界裡,不僅僅只有這兩種顏色模型。眾多的顏色模型中,灰度(grayscale)、HSV和HLS,也是你會在電腦視覺任務中經常看到的。
灰度(grayscale)很簡單。它透過黑白的強度,來表示圖像和形態,這也意味著它只有一個通道。要查看灰度圖像,我們需要將顏色模型轉換為灰色,就像前面對BGR圖像所做的操作那樣。
實際上,RGB圖像是由三個通道疊加而成的:R, G, B。所以如果我們把每個通道,一個一個的描繪出來,我們就可以理解顏色通道是如何構成的了!

觀察上面的圖片。這三幅圖像展示了每個通道是如何組成的。在R通道圖中,紅色飽和度高的部分看起來是白色的。這是由於紅色部分中的值接近255。在灰度模式下,值越高顏色就越白。你還可以使用G或B通道,來檢查這一點,並比較某些部分之間的差異。
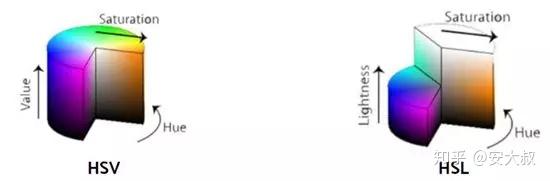
HSV和HLS有一些不同。正如在上圖看到的那樣,他們有一個三維的表達,更類似於人類的感知方式。HSV代表色調、飽和度和色值。HSL代表色調、飽和度和亮度。
HSV的中軸是色值,HSL的中軸是光量。沿著中心軸的角度,有色調和實際的顏色。與中心軸的距離屬於飽和度。轉換顏色模型的方法如下。

但是為什麼要變換顏色?這些有什麼用處?一個很典型的例子—車道檢測。觀察下圖,不同顏色模式下的車道線。在電腦視覺任務中,我們利用掩膜(masking)進行多色模式轉換。如果你想瞭解更多,關於圖像處理在車道檢測任務中的應用,可參看這篇文章。
圖像處理是就是對圖像數據進行預處理。它可以減少噪音,提取有用的顏色模型,從而簡化分類和檢測任務。因此,所有上述技術,包括我們稍後將討論的技術,都是為了幫助模型更容易地實現檢測。
三、在圖像上繪製圖形
讓我們在圖像上添加一些圖形。咱們這次代碼示例中使用的圖片來自巴黎「愛的牆」。上面用各種國際語言寫滿了「我愛你」。我們要做的是找到語言中的單詞,並用矩形標記它們。假如我們要定位韓語版本「我愛你」。首先,複製原始圖像,並用cv2.rectangle()函數繪製一個矩形,同時給出左上角和右下角的坐標值。如下:
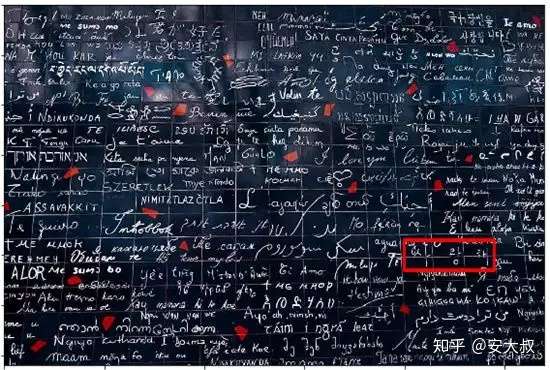
使用cv2.circle()函數,畫一個圓,圈出更多的韓語單詞。我們需要指定它的圓心的點和半徑的長度。
我們還可以將文本數據放在圖像上。使用cv2.putText()函數,我們可以指定文本的位置、字體樣式和大小。
四、不止是圖像
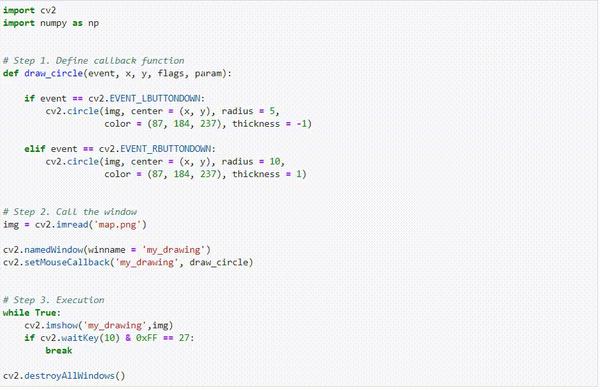
在上邊的介紹中,我們選取義大利和法國的兩張風景圖作為示例。假如,我們想要畫張地圖把這些地方標出來。那麼,首先我們要創建一個窗口並繪製圖形。不一樣的是這裡不是透過指定點繪製圖形,而是透過點擊響應。先試試繪制圓圈。首先創建一個函數,它將用位置和滑鼠點擊的數據繪製一個圓圈。
當按下滑鼠點擊按鈕時,使用cv2.EVENT_LBUTTONDOWN或 cv2.EVENT_RBUTTONDOWN 記錄位置數據。把滑鼠的位置設置為圓心(x, y),並繪製圓圈。
設置一個地圖作為窗口的背景,並將窗口命名為my_drawing。使用cv2.setMouseCallback()函數,在窗口和我們在步驟1中,創建的函數draw_circle之間建立了一個連接。
現在我們使用while循環執行窗口。if子句的執行條件是,當我們按下鍵盤上的ESC時,將窗口設置為關閉。
接下來嘗試繪制一個矩形。由於在cv2.rectangle()函數中,矩形需要兩個點來表示pt1和pt2,所以我們需要一個額外的步驟,來設置第一個點擊點為pt1,最後一個點擊點為pt2。我們要用cv2.EVENT_MOUSEMOVE和cv2.EVENT_LBUTTONUP來檢測滑鼠的移動。
我們首先將drawing = False定義為默認值。當按下左鍵時,繪圖變為true,我們將第一個位置設為pt1。如果正在繪圖,它將以當前點為pt2,並在移動滑鼠時,繼續繪製矩形。就像數字重疊一樣。當左鍵打開時,繪圖變為false,它將滑鼠的最後一個位置,作為pt2的最後一個點。
在步驟1中將draw_circle函數替換為draw_rectangle。請不要忘記在回調函數cv2.setMouseCallback()中進行更改。因此,整個代碼腳本將如下所示。
五、總結與展望
本篇文章介紹了Opencv的安裝、圖像顏色模型的轉換與圖形繪製。下次,將介紹圖像輪廓提出與目標檢測等技術。敬請期待!
 |
沒有留言:
張貼留言